Ubuntu ROS에 RealSense
2020년 3월 1일
-
SR300, D415, D435, D435i은 Realsense2로 사용 할 수 있습니다.
-
이 글은 Realsense2와 ROS kinetic과 melodic에 한정합니다.
-
최신 펌웨어가 제대로 동작 합니다.
Ubuntu에 라이브러리 설치
저장소 키를 등록 합니다.
sudo apt adv --keyserver keys.gnupg.net --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
Ubuntu 16.04에는 아래처럼 xenial 저장소를 추가합니다.
sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo xenial main" -u
Ubuntu 18.04에는 아래처럼 bionic 저장소를 추가합니다.
sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo bionic main" -u
라이브러리들을 설치 합니다.
sudo apt update
sudo apt install librealsense2
sudo apt install librealsense2-dkms librealsense2-utils
sudo apt install librealsense2-dev librealsense2-dbg # optional
동작하는지 테스트 합니다.
realsense-viewer
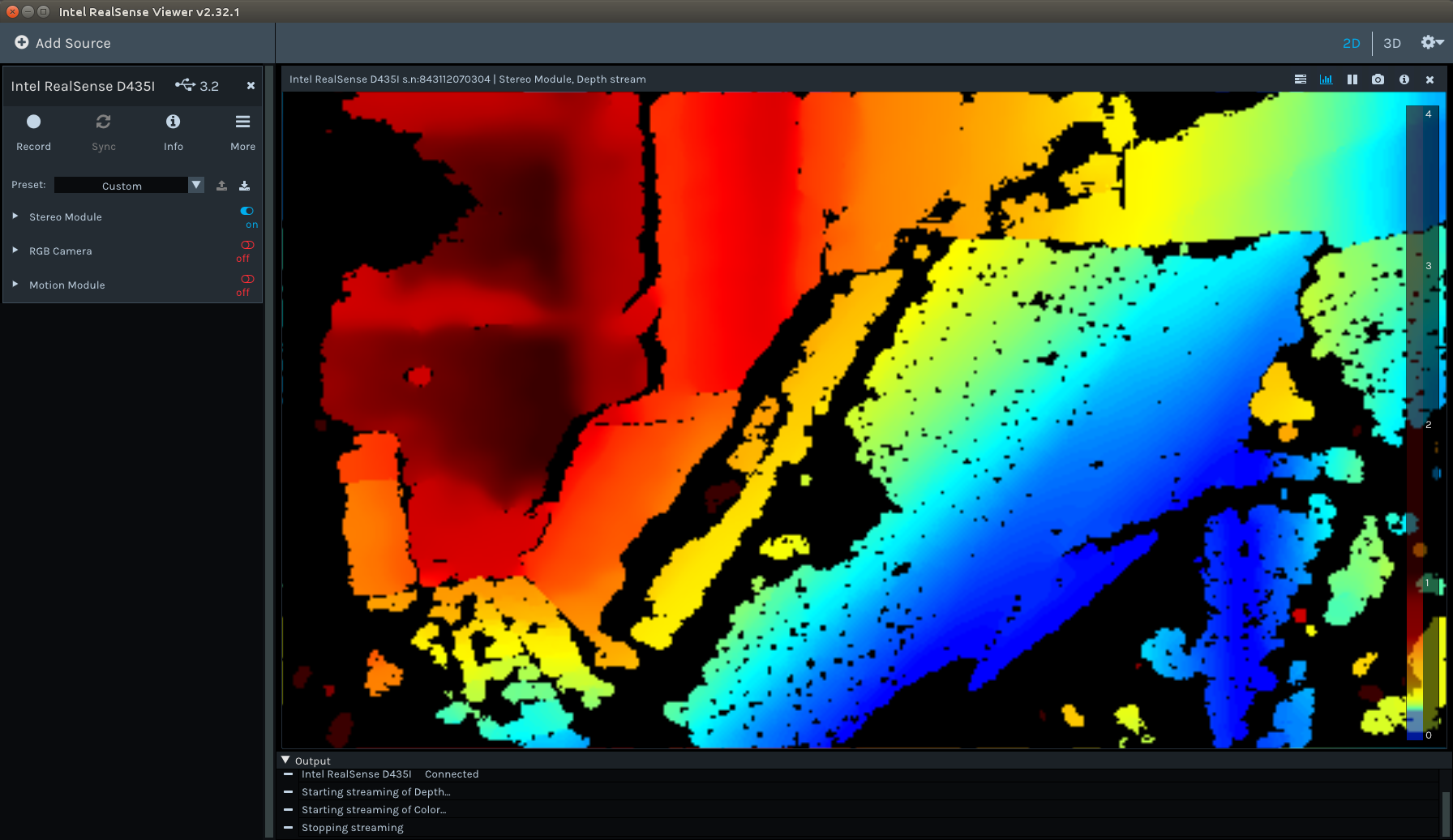
realsense-viewer에서, Install Recommended Firmware를 확인하고 설치 할 수 있습니다.
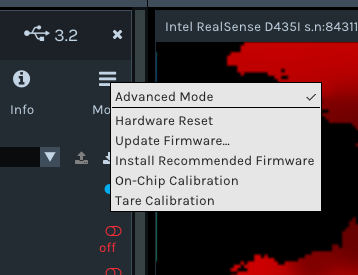
펌웨어 최신 버전이 ROS에서 제대로 동작합니다. 혹 업그레이드 중 중단되기도 하는데, 중단되면 장치 이름이 DxxxRecovery로 바뀝니다. 장치 선택하고 업그레이드를 하면 됩니다.
ROS에 패키지 설치
<distro>는 kinetic 또는 melodic 중 설치하고자 하는 Ubuntu와 ROS에 의존하여 선택합니다.
- Ubuntu 16.04 - kinetic
- Ubuntu 18.04 - melodic
sudo apt install ros-<distro>-librealsense2 ros-<distro>-realsense2-camera
ROS kinetic에 Realsense2 패키지를 설치하려면 아래와 같습니다.
sudo apt install ros-kinetic-librealsense2 ros-kinetic-realsense2-camera
ROS melodic에 Realsense2 패키지를 설치하려면 아래와 같습니다.
sudo apt install ros-melodic-librealsense2 ros-melodic-realsense2-camera
UVC 카메라로 보기
UVC 카메라는 USB video device class로 일반적인 웹카메라를 말합니다. 리얼센스도 깊이 영상을 UVC로 퍼블리쉬합니다.
터미널에서
roscore
하고, 새 터미널에서
sudo apt install ros-<distro>-uvc-camera
를 설치 합니다. 그리고 rosrun으로 uvc-camera를 퍼블리싱 합니다.
rosrun uvc_camera uvc_camra_node
를 합니다.
그리고, 새 터미널에서
rqt_graph
를 하여 토픽을 확인합니다. 아래와 같은 노드와 토픽을 볼 수 있습니다.
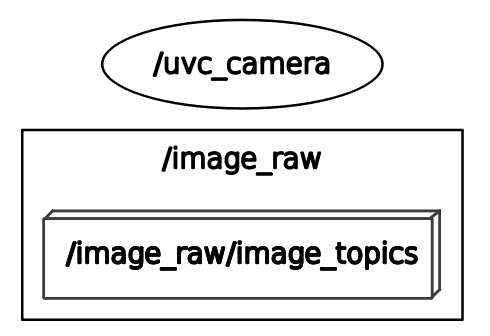
토픽 경로를 알았으니 /image_raw를 보겠습니다. 새 창을 열어서
rosrun image_view image_view image:=/image_raw
를 하여 영상을 확인 합니다.
RGBD 카메라의 토픽을 받아서 실행
실행중인 roscore를 제외하고. 나머지 터미널에서 Ctrl+C를 눌러서 중단 합니다.
새 터미널에서 카메라 퍼블리셔를 실행합니다.
roslaunch realsense2_camera rs_camera.launch
그리고, 새 터미널에서
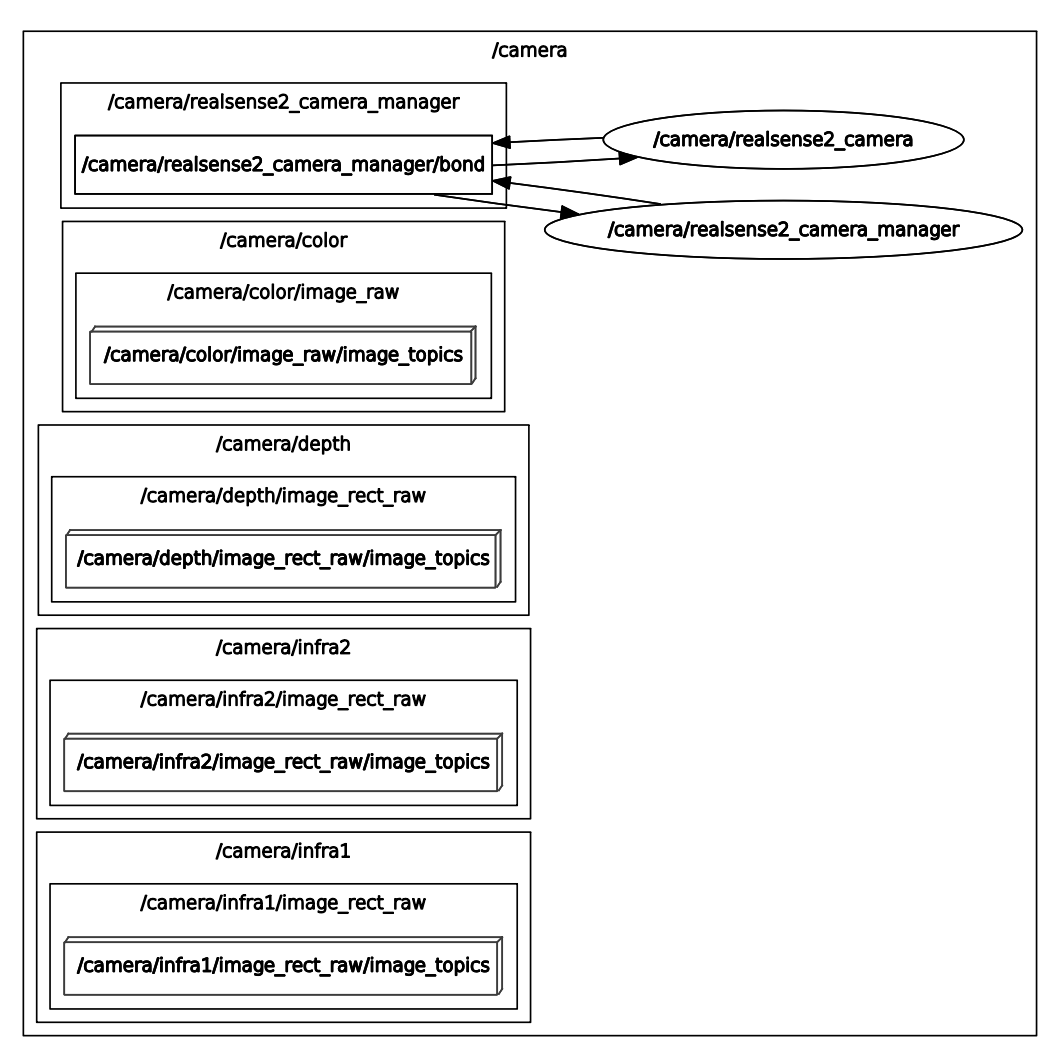
rqt_graph
로 토픽들을 확인해 봅니다. 아래는 D435i의 노드와 토픽입니다.
노드 그래프가 다르다면 노드가 준비 될때까지 계속 리프레시를 누르면서 기다리세요.
ROS melodic에서는 제대로 노드가 보이지 않으며 아래 내용은 동작하지 않습니다.
Realsense2는 다양한 토픽에서 영상을 받습니다.
RGB 영상:
rosrun image_view image_view image:=/camera/color/image_raw
Depth 영상:
rosrun image_view image_view image:=/camera/depth/image_rect_raw
Infra Red 1번 카메라의 영상:
rosrun image_view image_view image:=/camera/infra1/image_rect_raw
Infra Red 2번 카메라의 영상:
rosrun image_view image_view image:=/camera/infra2/image_rect_raw
포인트 클라이드 데모
실행중인 roscore를 제외하고. 나머지 터미널에서 Ctrl+C를 눌러서 중단 합니다.
새 터미널에서 RViz로 포인트 클라우드를 표시 합니다.
roslaunch realsense2_camera demo_pointcloud.launch
rs_aligned_depth
실행중인 roscore를 제외하고 터미널에서 Ctrl+C를 눌러서 중단 합니다.
rqt_graph에서 토픽을 갱신하고 확인 합니다.
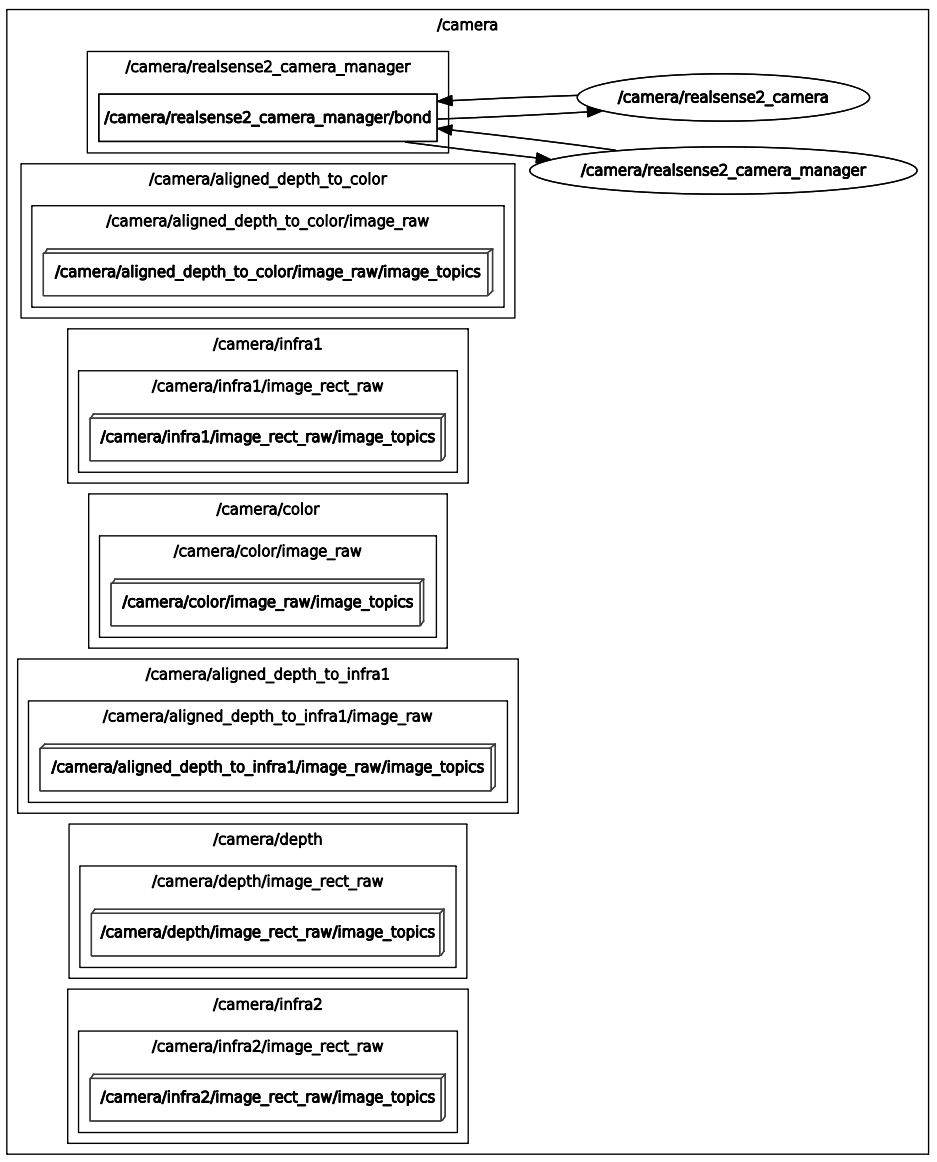
이전 roslaunch realsense2_camera rs_camera.launch 와 달리
/camera/aligned_depth_to_color/image_raw/camera/aligned_depth_to_infra1/image_raw
추가 토픽이 있습니다.
각각 image_view로 볼 수 있습니다.
rosrun image_view image_view image:=/camera/aligned_depth_to_color/image_raw
rosrun image_view image_view image:=/camera/aligned_depth_to_infra1/image_raw