ROS OpenManipulator
URDF, Gazebo, MoveIt!을 위한 패키지를 미리 설치 합니다.
sudo apt install ros-kinetic-ros-controllers
sudo apt install ros-kinetic-gazebo*
sudo apt install ros-kinetic-moveit*
sudo apt install ros-kinetic-industrial*
sudo apt install ros-kinetic-joint-state*
sudo apt install ros-kinetic-xpp
testbot_description 패키지를 생성합니다. 그리고 URDF 파일을 생성합니다.
cd ~/catkin_ws/src
catkin_create_pkg testbot_description urdf
cd testbot_description
mkdir urdf
cd urdf
gedit testbot.urdf
다음은 URDF 파일의 내용입니다. URDF 태그에 대한 자세한 설명은 이곳에 있습니다.
<?xml version="1.0" ?>
<robot name="testbot">
<material name="black">
<color rgba="0.0 0.0 0.0 1.0"/>
</material>
<material name="orange">
<color rgba="1.0 0.4 0.0 1.0"/>
</material>
<link name="base"/>
<joint name="fixed" type="fixed">
<parent link="base"/>
<child link="link1"/>
</joint>
<link name="link1">
<collision>
<origin xyz="0 0 0.25" rpy="0 0 0"/>
<geometry>
<box size="0.1 0.1 0.5"/>
</geometry>
</collision>
<visual>
<origin xyz="0 0 0.25" rpy="0 0 0"/>
<geometry>
<box size="0.1 0.1 0.5"/>
</geometry>
<material name="black"/>
</visual>
<inertial>
<origin xyz="0 0 0.25" rpy="0 0 0"/>
<mass value="1"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
<joint name="joint1" type="revolute">
<parent link="link1"/>
<child link="link2"/>
<origin xyz="0 0 0.5" rpy="0 0 0"/>
<axis xyz="0 0 1"/>
<limit effort="30" lower="-2.617" upper="2.617" velocity="1.571"/>
</joint>
<link name="link2">
<collision>
<origin xyz="0 0 0.25" rpy="0 0 0"/>
<geometry>
<box size="0.1 0.1 0.5"/>
</geometry>
</collision>
<visual>
<origin xyz="0 0 0.25" rpy="0 0 0"/>
<geometry>
<box size="0.1 0.1 0.5"/>
</geometry>
<material name="orange"/>
</visual>
<inertial>
<origin xyz="0 0 0.25" rpy="0 0 0"/>
<mass value="1"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
<joint name="joint2" type="revolute">
<parent link="link2"/>
<child link="link3"/>
<origin xyz="0 0 0.5" rpy="0 0 0"/>
<axis xyz="0 1 0"/>
<limit effort="30" lower="-2.617" upper="2.617" velocity="1.571"/>
</joint>
<link name="link3">
<collision>
<origin xyz="0 0 0.5" rpy="0 0 0"/>
<geometry>
<box size="0.1 0.1 1"/>
</geometry>
</collision>
<visual>
<origin xyz="0 0 0.5" rpy="0 0 0"/>
<geometry>
<box size="0.1 0.1 1"/>
</geometry>
<material name="black"/>
</visual>
<inertial>
<origin xyz="0 0 0.5" rpy="0 0 0"/>
<mass value="1"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
<joint name="joint3" type="revolute">
<parent link="link3"/>
<child link="link4"/>
<origin xyz="0 0 1.0" rpy="0 0 0"/>
<axis xyz="0 1 0"/>
<limit effort="30" lower="-2.617" upper="2.617" velocity="1.571"/>
</joint>
<link name="link4">
<collision>
<origin xyz="0 0 0.25" rpy="0 0 0"/>
<geometry>
<box size="0.1 0.1 0.5"/>
</geometry>
</collision>
<visual>
<origin xyz="0 0 0.25" rpy="0 0 0"/>
<geometry>
<box size="0.1 0.1 0.5"/>
</geometry>
<material name="orange"/>
</visual>
<inertial>
<origin xyz="0 0 0.25" rpy="0 0 0"/>
<mass value="1"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
</robot>
모두 작성되였으면 각 링크와 관절의 구성에 오류가 없는지 린트를 합니다.
check_urdf testbot.urdf
정상적이면 관절 구조를 볼 수 있습니다.
robot name is: testbot
---------- Successfully Parsed XML ---------------
root Link: base has 1 child(ren)
child(1): link1
child(1): link2
child(1): link3
child(1): link4
이 구조를 시각적인 파일로 문서화 합니다.
urdf_to_graphiz testbot.urdf
그려면 두개의 파일이 생성 됩니다.
Created file testbot.gv
Created file testbot.pdf
파일 내용을 확인 해 보겠습니다.

다시 패키지 폴더로 이동하여 launch 파일을 작성 합니다.
cd ~/catkin_ws/src/testbot_description
mkdir launch
cd launch
gedit testbot.launch
<launch>
<arg name="model" default="$(find testbot_description)/urdf/testbot.urdf" />
<arg name="gui" default="True" />
<param name="robot_description" textfile="$(arg model)" />
<param name="use_gui" value="$(arg gui)"/>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
</launch>
준비가 완료되면 각각의 터미널에서 testbot.launch와 RViz를 실행합니다.
터미널1:
roscore
터미널2:
roslaunch testbot_description testbot.launch
터미널3:
rosrun rviz rviz
그런데 오류가 발생
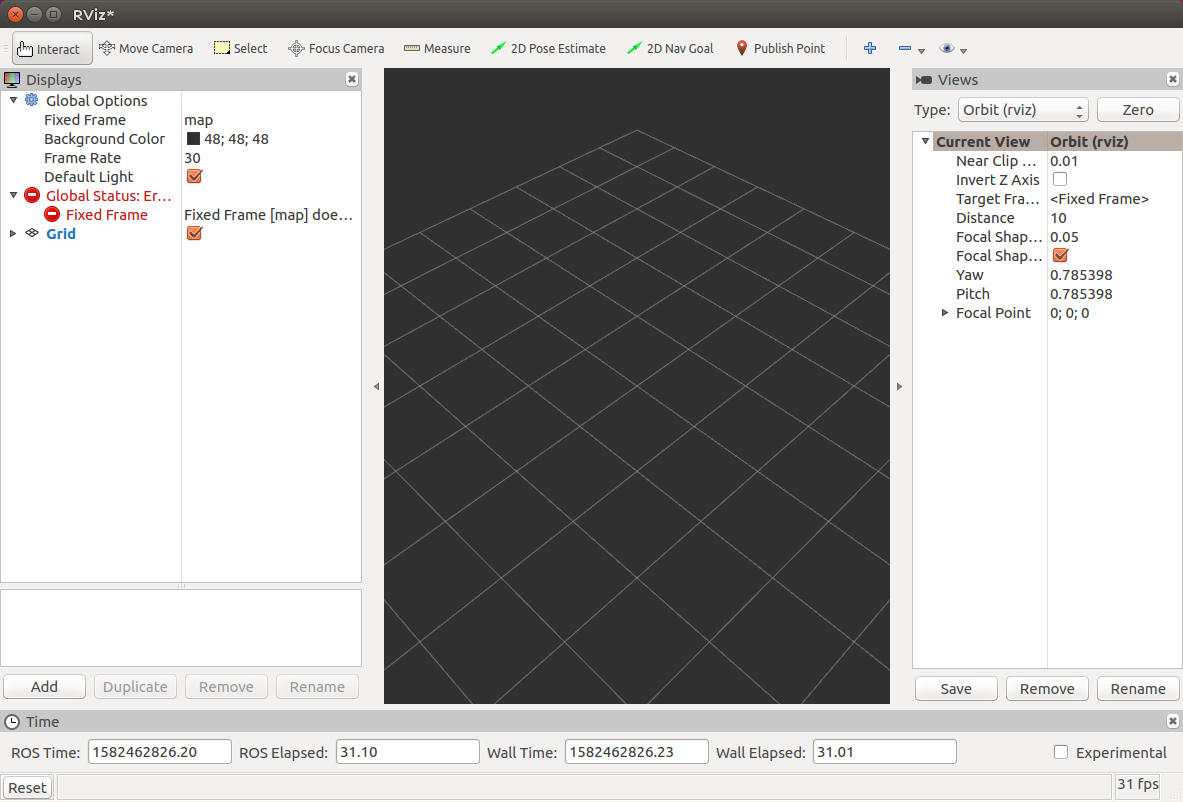
Fixed Frame [map] does not exist라는 오류 메시지 입니다.
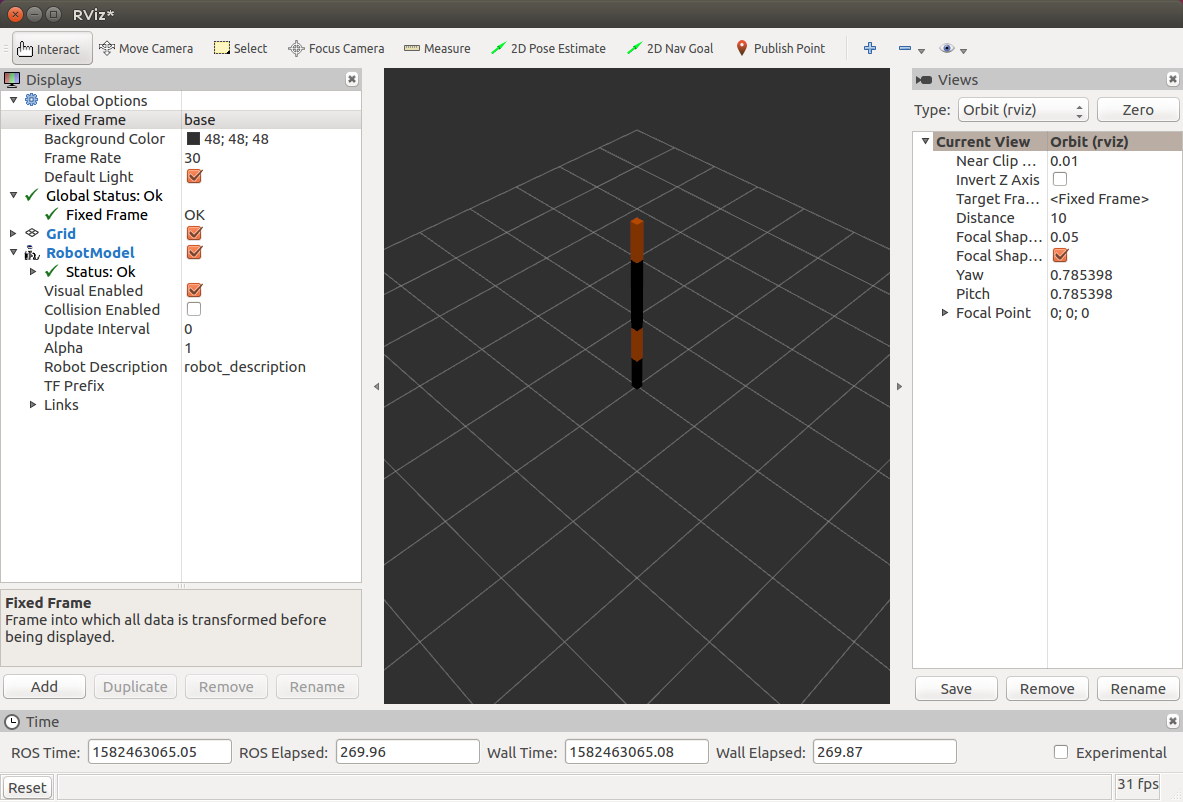
Displays아래 Add 버튼을 눌러서 RobotModel을 추가해주고, Displays에서 FixedFrame을 base로 선택 합니다. 그러면 로봇팔을 볼 수 있습니다.
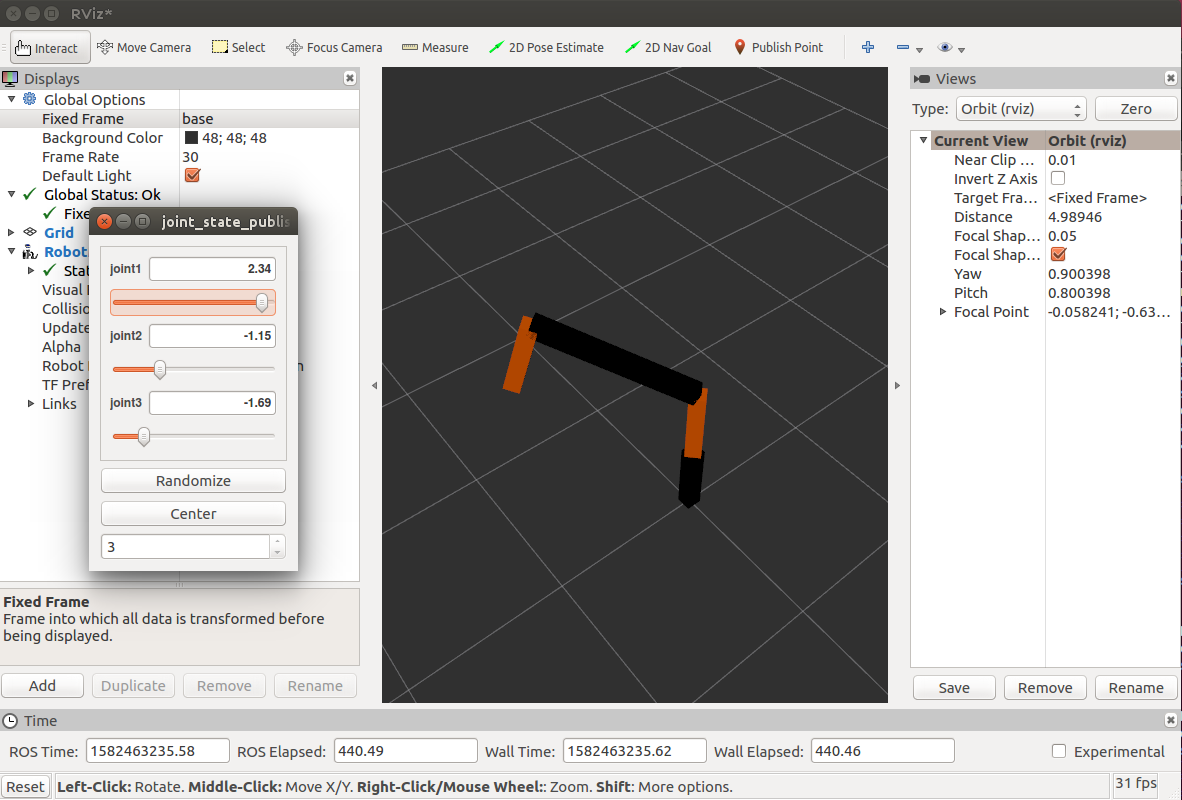
관절을 제어하여 로봇팔을 움직여 봅니다.
OpenManipulor Chain
튜토리얼 소스 코드를 다운로드 합니다.
cd ~/catkin_ws/src
git clone https://github.com/ROBOTIS-GIT/DynamixelSDK.git
git clone https://github.com/ROBOTIS-GIT/dynamixel-workbench.git
git clone https://github.com/ROBOTIS-GIT/dynamixel-workbench-msgs.git
git clone https://github.com/ROBOTIS-GIT/robotis_manipulator.git
git clone https://github.com/ROBOTIS-GIT/open_manipulator.git
git clone https://github.com/ROBOTIS-GIT/open_manipulator_msgs.git
git clone https://github.com/ROBOTIS-GIT/open_manipulator_simulations.git
open_manipulator폴더의 구조
-
open_manipulator: 메타 패키지. open_manipulator_control_gui: GUI 패키지.open_manipulator_controller: 제어 패키지.open_manipulator_description: 모델링 패키지.urdfmaterials.xacro: 물질 정보.open_manipulator.urdf.xacro: 매니풀레이터 모델링.open_manipulator.gazebo.xacor: 매니풀레이터 Gazebo 모델링.
launchopen_manipulator_rviz.launch: 매니풀레이터 모델링 정보 시각화, 상태 정보 퍼블리셔 노드 실행 파일.
open_manipulator_libs: 매니풀레이션 라이브러리.open_manipulator_moveit: MoveIt! 구성 패키지.open_manipulator_teleop: teleoperation 패키지.
실행은
roslaunch open_manipulator_gazebo open_manipulator_gazebo.launch
하면
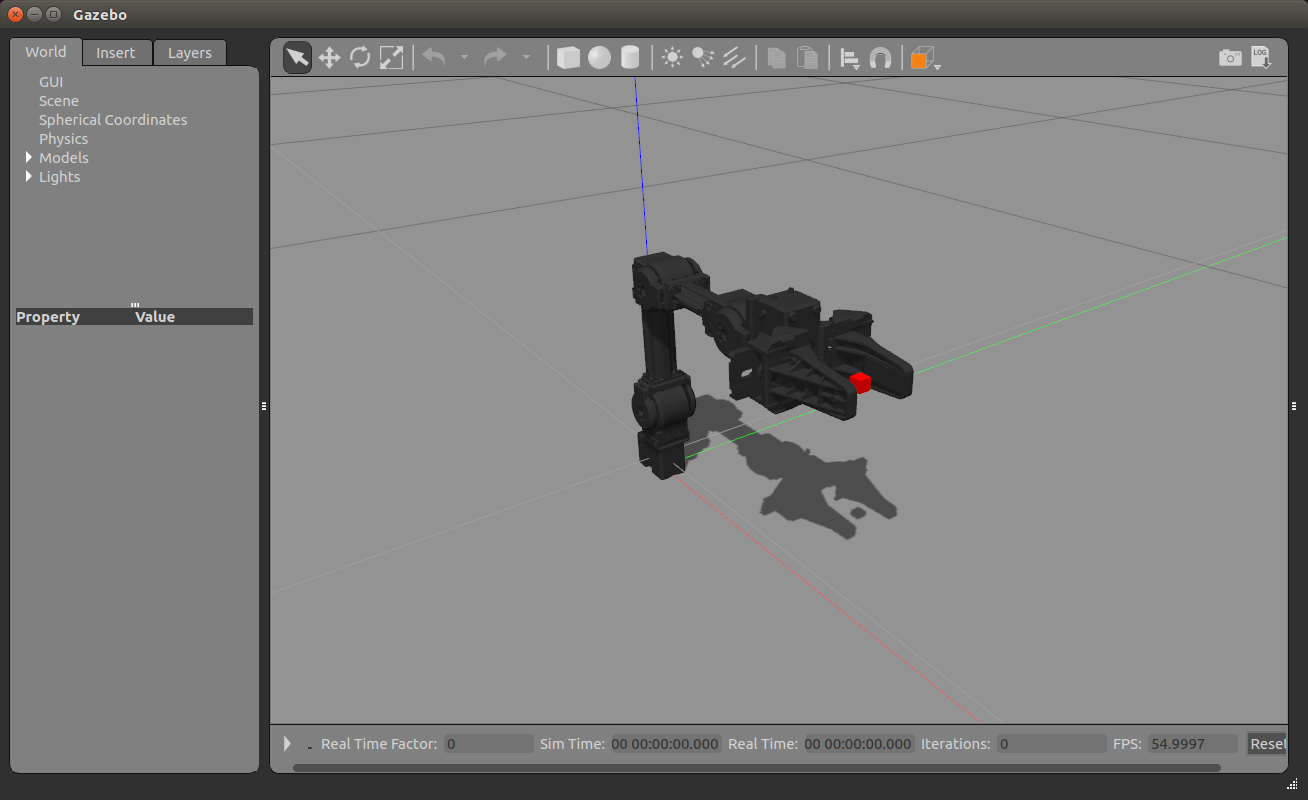
를 볼 수 있습니다. 새 터미널에서
rostopic list
하여, 토픽을 확인해 보면,
/clock
/gazebo/link_states
/gazebo/model_states
/gazebo/set_link_state
/gazebo/set_model_state
/open_manipulator/gripper_position/command
/open_manipulator/gripper_position/pid/parameter_descriptions
/open_manipulator/gripper_position/pid/parameter_updates
/open_manipulator/gripper_position/state
/open_manipulator/gripper_sub_position/command
/open_manipulator/gripper_sub_position/pid/parameter_descriptions
/open_manipulator/gripper_sub_position/pid/parameter_updates
/open_manipulator/gripper_sub_position/state
/open_manipulator/joint1_position/command
/open_manipulator/joint1_position/pid/parameter_descriptions
/open_manipulator/joint1_position/pid/parameter_updates
/open_manipulator/joint1_position/state
/open_manipulator/joint2_position/command
/open_manipulator/joint2_position/pid/parameter_descriptions
/open_manipulator/joint2_position/pid/parameter_updates
/open_manipulator/joint2_position/state
/open_manipulator/joint3_position/command
/open_manipulator/joint3_position/pid/parameter_descriptions
/open_manipulator/joint3_position/pid/parameter_updates
/open_manipulator/joint3_position/state
/open_manipulator/joint4_position/command
/open_manipulator/joint4_position/pid/parameter_descriptions
/open_manipulator/joint4_position/pid/parameter_updates
/open_manipulator/joint4_position/state
/open_manipulator/joint_states
/rosout
/rosout_agg
를 확인 할 수 있습니다.
토픽을 보내 로봇을 움직여 보겠습니다.
rostopic pub /open_manipulator/joint2_position/command std_msgs/Float64 "data: -1.0" --once
참조
-
https://github.com/ROBOTIS-GIT/ros_tutorials/tree/master/testbot_description
- https://github.com/ROBOTIS-GIT/DynamixelSDK.git
- https://github.com/ROBOTIS-GIT/dynamixel-workbench.git
- https://github.com/ROBOTIS-GIT/dynamixel-workbench-msgs.git
- https://github.com/ROBOTIS-GIT/robotis_manipulator.git
- https://github.com/ROBOTIS-GIT/open_manipulator.git
- https://github.com/ROBOTIS-GIT/open_manipulator_msgs.git
-
https://github.com/ROBOTIS-GIT/open_manipulator_simulations.git
- ROS 로봇 프로그래밍, 2017, 표윤석, 조한철, 정려운, 임태훈.