SDV 패러다임 전환의 기술적 한계와 2026년 완성차 업계의 생태계 재편 및 아키텍처 진화
2026-03-29, G31DR
1. 서론: 소프트웨어 중심 자동차(SDV) 전환의 구조적 모순과 2026년의 전략적 변곡점
현대 자동차 산업을 관통하는 가장 핵심적이고 파괴적인 화두는 단연 ’소프트웨어 중심 자동차(Software Defined Vehicle, 이하 SDV)’로의 전환이다. 자동차 산업의 차별화 요소는 과거 내연기관의 마력이나 기계적 조향 성능에서 점차 디지털 경험과 소프트웨어 역량으로 급격히 이동하고 있다. 소비자들은 자율주행(Autonomous Driving), 연결성(Connectivity), 전동화(Electrification), 공유 모빌리티(Shared Mobility)를 포괄하는 이른바 ‘ACES’ 트렌드에 부합하는, 스마트폰과 같이 지속적으로 진화하는 자동차를 원하고 있다. SDV는 단순히 차량 내부에 인포테인먼트 터치스크린과 내비게이션 소프트웨어를 추가하는 피상적인 개념을 넘어선다. 이는 하드웨어와 소프트웨어를 철저히 분리(Decoupling)하여 중앙 집중형 연산 장치가 차량의 가속, 제동, 조향, 댐퍼 제어, 에너지 관리 등 모든 동력과 편의 기능을 디지털 신호로 통제하는 혁명적인 아키텍처의 완전한 변화를 의미한다.
제조사 입장에서 SDV 패러다임의 완성은 차량 판매 이후에도 무선 업데이트(OTA, Over-the-Air)를 통해 차량의 성능을 개선하고, 차량 제어 루프를 실시간으로 최적화하며, 방대한 데이터를 바탕으로 자율주행 알고리즘을 고도화할 수 있는 토대를 마련해 준다. 나아가 이는 자율주행 기능의 구독형 서비스 등 지속 가능한 소프트웨어 기반 수익(SaaS)을 창출할 수 있는 생존의 필수 조건이 되었다. 관련 글로벌 자동차 소프트웨어 및 전자장치 시장은 2030년까지 약 4,600억 달러 규모로 성장할 것으로 전망되며, 2035년에는 전체 시장이 1조 2천억 달러 규모에 달해 1차 부품사(Tier 1) 비즈니스의 25% 이상을 소프트웨어가 차지할 것으로 예측된다.
그러나 2020년대 초반, 다수의 글로벌 레거시 완성차 업체들이 야심 차게 발표했던 독자적 SDV 전환 로드맵과 대규모 투자 계획은 2026년 현재 철저한 실패와 뼈아픈 전략적 궤도 수정이라는 결과로 귀결되고 있다. 전통적인 하드웨어 엔지니어링 역량에만 의존해 온 레거시 업체들이 기존의 분산형 전자제어장치(ECU) 아키텍처를 점진적으로 수정하여 SDV를 구현하려 했던 안일한 접근은 심각한 구조적 한계에 부딪혔다. 수백 개의 분산된 ECU와 얽히고설킨 물리적 배선(Wiring Harness)을 유지한 상태로는 폭발적으로 증가하는 데이터 병목 현상을 해결할 수 없었으며, 시스템 간의 복잡한 충돌을 관리하는 것은 불가능에 가까웠다. 이를 타개하기 위해 중앙 집중형(Central) 또는 구역형(Zonal) 아키텍처로의 전면적인 하드웨어 재설계가 요구되었으나, 이 과정에서 기능 안전 규제(ISO 26262)를 전통적인 정공법으로 돌파하려던 시도는 개발 비용의 기하급수적 증가와 신차 출시의 수년 지연이라는 치명적 덫으로 작용했다.
폭스바겐(Volkswagen) 그룹의 소프트웨어 전담 자회사 카리아드(Cariad)가 겪은 참혹한 실패와, 혼다(Honda)가 2026년 3월 소니(Sony)와의 합작 프로젝트 ’아필라(AFEELA)’를 전면 백지화한 사건은 레거시 완성차 업체가 독자적인 소프트웨어 생태계를 구축하는 것이 얼마나 비현실적인 목표였는지를 적나라하게 방증한다. 그 결과, 2026년 자동차 산업의 생태계는 하드웨어 연산 능력과 핵심 운영체제(OS)를 독점한 엔비디아(NVIDIA)와 같은 ‘Tier 0.5’ 공급사의 부상, 그리고 리비안(Rivian) 등 소프트웨어 네이티브 신흥 기업에 레거시 업체가 천문학적인 자본을 투자하며 기술을 구걸하는 형태로 철저히 재편되었다. 본 심층 연구 보고서는 SDV 전환 과정에서 레거시 업체들이 직면했던 물리적, 소프트웨어적 병목 현상을 매우 세밀하게 분석하고, 테슬라(Tesla)와의 기능 안전 규제 대응 방식의 본질적 차이, 오토사(AUTOSAR)의 구조적 한계를 규명한 뒤, 2026년 현재 새롭게 정립된 글로벌 주요 완성차 업체들의 SDV 거버넌스와 전략적 지형도를 입체적으로 조망한다.
2. 레거시 아키텍처의 물리적 및 논리적 병목과 구역형(Zonal) 아키텍처 도입의 당위성
SDV 구현을 가로막는 가장 거대하고도 물리적인 장벽은 지난 수십 년간 자동차 산업에 고착화되어 온 분산형 전기·전자(E/E) 아키텍처의 비효율성에 있다. 자동차는 더 이상 단순한 기계 장치가 아니라 바퀴 달린 거대한 고성능 컴퓨팅 플랫폼으로 변모하고 있지만, 그 내부 구조는 과거의 유산에 철저히 발목 잡혀 있었다.
2.1 분산형 ECU 아키텍처의 파편화와 물리적 배선망(Wiring Harness)의 붕괴
1980년대 전자제어 연료 분사 장치나 ABS가 도입되던 시절부터 시작된 과거의 차량 개발 방식은, 새로운 기능(예: 첨단 운전자 보조 시스템(ADAS), 인포테인먼트, 전동 시트, 차선 유지 보조 등)이 추가될 때마다 해당 특정 기능만을 전담하여 제어하는 독립된 마이크로컨트롤러인 전자제어장치(ECU)와 그에 수반되는 전용 전력 및 데이터 배선을 차량 설계에 일대일로 덧붙이는 방식이었다. 이러한 유기적이고 점진적인 시스템 추가 방식은 초기에는 각 기능의 독립성을 보장하는 데 유리했으나, 차량의 전장화가 가속화됨에 따라 프리미엄 차량 한 대당 무려 100~150개에 달하는 독립된 ECU를 탑재하게 만드는 끔찍한 복잡성을 초래했다.
이러한 분산형 아키텍처가 낳은 가장 큰 재앙은 물리적 배선망, 즉 와이어링 하네스(Wiring Harness)의 비대화다. 각각의 ECU에 전력을 공급하고 데이터를 교환하기 위해 연결된 배선은 수 마일(약 1.6km 이상)의 길이에 달하게 되었으며, 그 무게만 50kg에서 최대 100kg(약 150파운드)에 육박하게 되었다. 이러한 ’스파게티 배선(Spaghetti Wiring)’은 단순히 차량 내부의 물리적 조립 공간을 차지하는 것을 넘어, 전기차(EV)의 경우 막대한 중량 증가로 인해 배터리 효율을 떨어뜨리고 핵심적인 주행 거리를 심각하게 갉아먹는 주요 원인으로 작용한다. 또한 전력 분배 측면에서도 기존 아키텍처는 접근이 용이한 차량 내 특정 공간에 기계적 릴레이(Mechanical Relays)와 용단 퓨즈(Melting Fuses)로 구성된 중앙 전원 분배 박스를 두고 모든 ECU에 개별적으로 전력을 쏘아 보내는 비효율적인 방식을 취해 전력 낭비와 배선 복잡성을 가중시켰다.
더욱 치명적인 문제는 데이터 통신 속도의 병목 현상이다. 수백 개의 ECU가 구형 90나노미터(nm) 공정 기반의 프로세서로 구동되며, 구형 CAN(Controller Area Network) 버스나 LIN, FlexRay와 같은 통신 프로토콜을 통해 파편화된 데이터를 주고받는다. 이러한 폐쇄적이고 구시대적인 버스 시스템은 기껏해야 8~10Mbps, 최고 성능의 버스라 할지라도 최대 100Mbps 수준의 느린 전송 속도만을 제공한다. 오늘날 일반적인 노트북의 통신 속도에도 한참 미치지 못하는 이 대역폭으로는, 다수의 고해상도 카메라와 레이더, 라이다(LiDAR)에서 실시간으로 쏟아지는 기가바이트(GB) 단위의 센서 데이터를 융합하여 찰나의 순간에 판단을 내려야 하는 자율주행 알고리즘을 구동하는 것이 물리적으로 불가능하다.
또한, 각 ECU가 서로 다른 다수의 1차 부품사(Tier 1)에서 제공된 고유의 독자적인 펌웨어와 컨트롤러를 사용하기 때문에, 중앙 컴퓨터에서 차량 전체의 기능을 유기적으로 조율하거나 한 번의 명령으로 시스템 전체를 최적화하는 완벽한 의미의 무선 소프트웨어 업데이트(OTA) 구현은 원천적으로 차단된다. 예를 들어, 하나의 신규 기능을 추가하거나 버그를 패치하려 해도 얽혀있는 다수의 ECU 공급사들과 개별적으로 협의하고 개별 펌웨어를 수정해야 하므로, 업데이트 민첩성은 극도로 떨어지고 유지보수 비용은 기하급수적으로 증가한다.
2.2 과도기적 도메인(Domain) 통합의 한계
이러한 문제를 인식한 레거시 완성차 업체들은 수많은 ECU를 ’기능별’로 묶어 파워트레인, 섀시, 차체 제어, 인포테인먼트 등 몇 개의 주요 도메인(Domain) 단위로 통합하는 ’도메인 제어 아키텍처(Domain Centralized Architecture)’를 도입하며 문제 해결을 시도했다. 이는 하드웨어의 파편화를 일부 줄여주는 효과는 있었으나, 기능적 칸막이(Silos)를 완전히 없애지는 못했다. 자율주행 및 SDV 환경에서는 차체 제어(조향)와 인포테인먼트(내비게이션), 파워트레인(가속) 간의 실시간 융합이 필수적인데, 도메인 간의 데이터 교환 시 발생하는 지연 시간(Latency) 문제와 도메인마다 서로 다른 파편화된 소프트웨어 스택의 충돌은 여전히 해결되지 않은 채 새로운 형태의 한계로 작용했다.
2.3 구역형(Zonal) 아키텍처의 기술적 혁신, 비용 절감 및 조립 제조의 혁명
SDV 구현의 진정한 물리적 기반을 마련하기 위해, 선도적인 완성차 업체와 기술 기업들은 기능 중심의 묶음이 아닌 ’차량 내 물리적 위치(구역)’를 기준으로 차량의 전자 시스템을 철저히 재편하는 ’구역형(Zonal) 아키텍처’로 전면적인 재설계를 단행했다.
구역형 아키텍처는 차량을 전면 좌측, 전면 우측, 후면 등 여러 개의 물리적 구역(Zone)으로 나누고, 해당 구역 내에 위치한 모든 센서(카메라, 레이더 등)와 액추에이터(모터, 브레이크 등)의 로우(Raw) 데이터를 그 기능과 무관하게 하나의 지역 허브인 ’구역 제어기(Zonal Controller)’가 수집하도록 한다. 구역 제어기는 일종의 거대한 신경망 말단 역할을 수행하며 수집된 데이터를 초고속 차량용 이더넷(Automotive Ethernet) 기반의 고속 데이터 하이웨이를 통해 차량 중앙에 위치한 하나 또는 소수의 ’중앙 고성능 컴퓨터(Central Compute Unit)’로 전송한다. 차량의 핵심적인 소프트웨어 두뇌 역할을 하는 이 중앙 컴퓨터가 복잡한 연산과 제어 판단을 수행한 후, 다시 구역 제어기를 통해 각 액추에이터로 명령을 내리는 구조다. 현재 Zonal Controller 관련 하드웨어 시장은 전체 구조의 약 46%를 차지하며 핵심적인 인터페이스 역할을 수행하고 있다.
이러한 물리적 토폴로지(Topology)의 재편은 혁신적인 경량화와 비용 절감을 가져온다. 테슬라는 모델 3에 실험적인 구역형 아키텍처 요소를 적용하여 기존 약 3km에 달하던 차량 내 케이블 총길이를 절반 수준인 1.5km로 줄였으며, 전체 와이어링 하네스의 무게를 무려 85%까지 급감시키는 놀라운 성과를 입증했다. 글로벌 자동차 부품 업계에 따르면, 구역형 아키텍처의 전면 도입은 평균적으로 배선 복잡성과 길이를 40~60% 감소시키고 하네스 무게를 최대 30% 이상 경감시켜 전기차의 주행 거리 연장에 직접적으로 기여한다. 전력 분배의 효율성 역시 극대화된다. 구역형 구조에서는 무거운 중앙 릴레이 박스 대신 구역 제어기 내부에 반도체 기반의 고사이드 스위치(High-side switches)와 스마트 퓨즈(Smart Fuses)를 장착하여, 사용하지 않는 잉여 모듈의 전력을 즉각적으로 차단하는 최적화된 스마트 전력 분배 네트워크를 구축할 수 있다. 더 나아가, 기존 12V 기반의 시스템을 48V 전력 시스템으로 전환함으로써 동일한 전력을 훨씬 낮은 전류로 공급할 수 있게 되어 전선의 굵기와 무게를 더욱 획기적으로 줄일 수 있다.
구역형(Zonal) 아키텍처 도입에 따른 물리적 경량화 효과
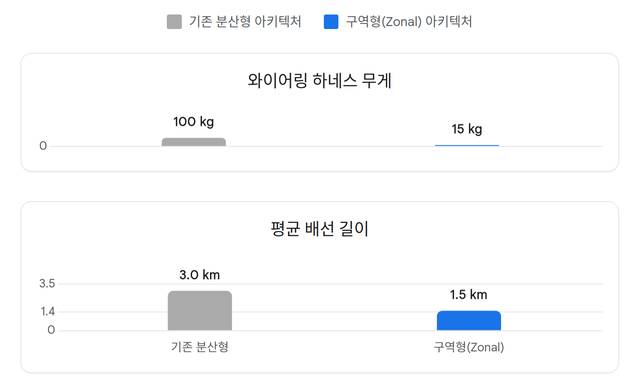
테슬라 모델 3 등의 초기 Zonal 아키텍처 적용 사례를 기반으로 한 전통적 분산형 구조와 구역형 구조의 배선 무게 및 길이 비교. 아키텍처의 전환은 최대 85%의 무게 절감과 배선 길이의 반등을 가능하게 하여 전기차의 주행 거리 연장 및 조립 자동화에 기여한다.
또한 이 과정은 단순한 부품 변경을 넘어 차량 제조 공정의 비즈니스 모델 자체를 자동화 영역으로 이끈다. 기존의 복잡하고 무거운 거대 와이어링 하네스는 로봇이 다루기 힘들어 전적으로 인간 노동자의 수작업 조립에 의존해야 했으나, 구역별로 짧게 분할되고 표준화된 모듈형 커넥터(예: 전력과 고속 데이터를 통합한 Molex의 MX-DaSH 시스템 등)를 활용한 소형 배선 체계는 공장 내 조립 공정의 완벽한 로봇 자동화를 가능하게 한다. 세계적인 연결 부품 제조사인 TE Connectivity 역시 구역형 구조가 지배하는 시대에는 굵직한 중앙 선로 대신 수많은 센서와 액추에이터를 구역 허브와 연결하는 작고 자동화 생산이 가능한 커넥터 수요가 폭증할 것으로 내다보고 있다. 업계 예측에 따르면, 이러한 이점에 힘입어 2023년 기준 전체 생산 차량의 2% 수준에 불과했던 구역형 아키텍처 탑재 차량의 비중은 2030년대 중반에 이르러 35~40%까지 폭발적으로 상승할 것으로 전망된다.
그러나 물리적인 와이어의 무게를 덜어내는 구역형 아키텍처로의 전환은 소프트웨어의 논리적 복잡성을 극한으로 끌어올리는 거대한 부작용을 동반한다. 과거에는 브레이크 작동을 제어하는 ECU와 인포테인먼트 화면을 띄우는 ECU가 물리적으로 단절되어 있어 서로 간섭할 여지가 없었으나, 중앙 집중형 구조에서는 차량 내비게이션 데이터, 자율주행 라이다 센서 데이터, 그리고 생명과 직결된 브레이크 제어 명령이 모두 하나의 동일한 고속 네트워크 인프라 위를 혼재되어 굴러다니게 된다. 바로 이 지점에서 자동차 산업을 짓누르는 가장 거대하고 치명적인 과제인 ’기능 안전 규제(Functional Safety)’와 이종 소프트웨어 모듈 간의 ‘시스템 충돌’ 문제가 전면에 대두된다.
3. 기능 안전 규제(ISO 26262) 대응 방식의 근본적 차이: 테슬라의 시스템적 우회와 레거시의 규제 딜레마
차량 내부의 수백 가지 소프트웨어를 하나의 거대한 중앙 컴퓨터로 통합하는 과정에서 막대한 비용이 소모되고 개발 일정이 수년씩 지연되는 가장 근본적인 원인은 바로 ISO 26262로 대표되는 매우 엄격한 자동차 기능 안전 규제 준수 여부에 있다. 산업용 컴퓨터나 스마트폰의 소프트웨어 오류는 단순한 재부팅으로 해결되지만, 주행 중인 자동차의 조향이나 제동 등 생명과 직결되는 핵심 안전 애플리케이션의 실시간 제어 오류는 탑승자의 생명과 직결되는 치명적인 재난을 초래한다.
이를 방지하기 위해 제정된 ISO 26262 표준은 시스템의 위험도를 ASIL(Automotive Safety Integrity Level)이라는 등급으로 분류하며, 그중에서도 고속 주행 시 브레이크 전체 시스템의 상실과 같이 심각한 또는 치명적인 부상 위험을 초래할 수 있는 최고 수준의 위험 요소에 대해서는 ASIL-D 등급을 부여한다. ASIL-D 인증을 획득하기 위해서는 1시간 연속 작동 시 하드웨어의 무작위적 결함이나 체계적 오류로 인한 치명적 실패 발생 확률이 10^{-8} 이하(사실상 무결점에 가까운 확률)임을 극도로 복잡한 수학적 모델링과 광범위한 문서화 작업을 통해 완벽하게 증명해야만 한다. 최근에는 자율주행 기술의 발전에 따라 소프트웨어나 전자 장치 자체의 결함이 없더라도 인지 오류나 기계학습(Machine Learning) 알고리즘의 한계로 인해 발생할 수 있는 사고까지 포괄하여 예방하기 위한 SOTIF(Safety of Intended Functionality, ISO 21448) 규제까지 추가되면서 안전 검증의 문턱은 그 어느 때보다 높아졌다.
이처럼 엄혹한 규제 환경을 마주한 레거시 완성차 업체와 혁신의 아이콘인 테슬라는 안전을 담보하는 철학과 접근 방식에서 극명한 차이를 보였다.
3.1 레거시 완성차 업체의 정공법과 규제 준수가 낳은 ‘애자일(Agile)의 죽음’
수십 년간 기계 공학과 신뢰성 중심의 문화를 구축해 온 기존 완성차 업체들은, SDV라는 미지의 영역에서도 그들이 가장 잘 아는 전통적인 정공법인 V-모델(V-Model) 개발 프로세스에 따라 기능 안전 이슈를 정면 돌파하려 시도했다. 즉, 차량 내부에 탑재되는 개별 칩셋, 센서, 그리고 모든 소프트웨어 라인 하나하나의 단위(Unit) 레벨에서부터 철저한 사전 검증을 거쳐 외부 인증 기관의 ISO 26262 ASIL-D 인증을 공식적으로 획득하는 방식을 택한 것이다.
레거시 업체들이 이토록 개별 부품 단위의 엄격한 인증에 집착한 이유는, 전통적인 자동차 산업 구조 특성상 사고 발생 시 수많은 다중 공급망(Tier 1, Tier 2) 간에 치열한 책임 소재 공방이 벌어지기 때문이다. 법적 분쟁에서 자사의 무결성을 증명할 유일한 방패는 철저한 ’추적성(Traceability)’을 갖춘 인증 문서뿐이었다. 그러나 이러한 완벽주의적 정공법은, 소프트웨어를 지속적으로 업데이트하고 배포해야 하는 SDV 환경의 핵심 요소인 CI/CD(Continuous Integration / Continuous Deployment) 철학과 정면으로 충돌했다.
스마트폰처럼 애자일(Agile)하게 코드 한 줄을 수정하고 새로운 기능을 무선으로 배포할 때마다, 기존 V-모델 환경에서는 차량 전체 시스템에 미치는 영향을 다시 평가하고 결함 트리 분석(Fault Tree Analysis)과 같은 방대한 ISO 26262 안전 문서화 작업을 원점부터 다시 반복 수행해야만 한다. 소프트웨어가 지속적으로 업데이트되면서 이전 버전에 잠복해 있던 숨겨진 결함(Undiscovered Faults)이 새로운 업데이트와 충돌하여 예기치 못한 치명적 오류를 발생시킬 확률이 기하급수적으로 증가하기 때문이다. 그 극단적인 예로, 일본의 모 글로벌 레거시 완성차 업체는 2023년 한 해 동안 8번의 마이너 소프트웨어 업데이트를 진행하는 과정에서 개별 업데이트는 문제를 해결하는 듯 보였으나, 결국 소프트웨어 간의 숨겨진 호환성 충돌이 누적되면서 판매된 전체 차량의 무려 12%에서 주행 중 인포테인먼트 시스템이 완전히 다운되고 전면적인 공장 초기화를 진행해야만 하는 참사를 겪기도 했다. 완벽을 기하려는 무거운 정공법적 프로세스가 역설적으로 SDV의 핵심 가치인 유연하고 민첩한(Agile) 소프트웨어 혁신을 스스로 질식시켜 버린 것이다.
3.2 테슬라의 파괴적 혁신: 하드웨어 이중화(Redundancy)와 규제의 시스템적 우회
반면 소프트웨어 네이티브 기업인 테슬라는 기존 자동차 업계의 뿌리 깊은 상식인 ’개별 부품 단위의 절대적 무결성 증명’이라는 무거운 짐을 과감히 내던지고, 이를 시스템적 차원의 아키텍처 설계로 우회하는 파격적인 전략을 채택했다. 테슬라는 치명적인 안전 보장을 위해 블랙베리의 QNX나 윈드리버(Wind River) 시스템즈가 제공하는, 수년에 걸쳐 ISO 26262 외부 인증을 완료한 값비싼 상용 실시간 운영체제(RTOS)나 보수적인 기성 자동차용 반도체에 의존하지 않았다. 그 대신 철저한 자체 기술 내재화를 목표로 커스텀 리눅스(Custom Linux) 운영체제와 독자 설계한 FSD(Full Self-Driving) 칩을 전격 도입했다.
기존 업계가 개별 칩셋과 운영체제 코드 자체가 물리적으로 절대 고장 나지 않음을 수학적으로 증명(ASIL-D)하는 데 몰두하고 있을 때, 테슬라는 실리콘 밸리의 철학을 바탕으로 **“소프트웨어 버그와 하드웨어 고장은 어떤 상황에서든 반드시 발생할 수밖에 없다”**는 대전제를 수용했다. 그리고 그 해결책으로 ’하드웨어 이중화(Redundancy)와 상호 교차 검증’이라는 시스템 차원의 안전장치를 구축했다.
테슬라의 FSD 칩 하드웨어 구조를 들여다보면 이 철학이 명확히 드러난다. 테슬라는 하나의 온보드 제어기(HW3 기준)에 완전히 동일한 두 개의 FSD 칩을 장착했다. 각 FSD 칩은 초당 2,300프레임의 이미지를 처리할 수 있는 성능을 지녔으며, 2.6GHz로 동작하는 12개의 ARM Cortex-A72 중앙처리장치(CPU), 1GHz의 Mali GPU, 그리고 테슬라의 신경망 아키텍처 처리에 극도로 최적화된 2GHz 속도의 듀얼 시스톨릭 어레이(Systolic Arrays, 신경망 가속기, 칩당 72 TOPS)로 구성되어 보드 전체 기준 총 144 TOPS의 압도적인 연산 능력을 자랑한다. 이 칩 내부에는 68GB/s의 막대한 대역폭을 지원하는 128비트 LPDDR4 메모리와 32M SRAM이 탑재되어 데이터 병목을 해소한다.
주행 중 두 개의 독립된 FSD 칩은 카메라에서 들어오는 동일한 주행 상황 데이터를 각기 독립적으로 처리하여 조향 및 제동 결론을 도출한다. 이후 시스템은 두 칩의 연산 결과를 실시간으로 ’교차 검증(Cross-validation)’한다. 만약 소프트웨어 버그나 순간적인 하드웨어 오류로 인해 두 칩의 판단이 불일치할 경우, 시스템은 어느 쪽 판단도 신뢰하지 않고 즉각적으로 차량을 가장 안전한 상태로 정지시키거나 운전자에게 제어권을 넘기는 페일 오퍼레이셔널(Fail-operational) 또는 페일 디그레이디드(Fail-degraded) 모드로 진입하도록 설계되어 있다. 더 나아가 차세대 모델에 탑재될 예정인 HW4.5 및 AI5 플랫폼에서는 기존의 듀얼 칩 구조를 넘어 3개의 SoC(System-on-Chip)를 배치하는 ’3중 모듈 구조(Triple-modular Design)’로 진화하고 있다. 이를 통해 세 개의 칩이 각기 판단을 내리고 다수결로 주행 결정을 내리거나, 하나의 칩을 향후 배포될 최신 알고리즘을 백그라운드에서 검증하는 ‘섀도 모드(Shadow Mode)’ 전용으로 할당하여 안전성을 한층 더 극대화하는 방향으로 발전하고 있다.
센서의 구성 측면에서도 테슬라는 극단적인 단순화를 추구했다. 웨이모(Waymo)나 크루즈(Cruise) 등 전통적인 자율주행 기업들이 레이더, 초음파 센서, 카메라, 그리고 값비싼 라이다(LiDAR)를 모두 장착하는 다중 센서 중복성(Multi-sensor Modality)을 고집하는 것과 달리, 테슬라는 오직 카메라 비전 데이터에만 의존하는 ‘비전 온리(Vision-only)’ 방식을 고수하고 있다. 테슬라가 라이다를 배제한 이유는 단순히 원가 절감을 넘어 알고리즘의 맹점을 피하기 위함이다. 서로 다른 특성을 가진 다기종 센서 간의 데이터가 악천후 등으로 인해 상충할 경우(예: 카메라는 장애물이 없다고 인식하지만 라이다는 있다고 인식할 경우), 어느 센서의 데이터를 우선할지 결정하는 센서 퓨전(Sensor Fusion) 알고리즘이 기하급수적으로 복잡해지며 이는 곧 심각한 소프트웨어 버그와 치명적 오판으로 직결된다는 기술적 신념 때문이다.
결정적으로 테슬라는 산업 전반의 자율주행 기술 경쟁에서 자사의 진보된 풀 셀프 드라이빙(FSD) 시스템을 법률적, 규제적 관점에서 완벽한 자율주행인 레벨 4가 아닌, 운전자가 최종 책임을 지는 ‘레벨 2(Level 2)’ 주행 보조 시스템으로 철저히 규정했다. 이러한 교묘한 규제 회피 전략을 통해 테슬라는 제조사가 짊어져야 할 막대한 법적 책임과 입증의 부담을 최소화하는 동시에, 전 세계 도로를 누비는 700만 대 이상의 양산 차량을 거대한 데이터 수집기이자 ‘섀도 모드’ 테스트베드로 활용하며 타사가 범접할 수 없는 속도로 AI 알고리즘을 개선하는 애자일 개발의 극치를 보여주었다. 전통적인 ISO 26262 기준에 얽매이지 않는 이들의 독자적인 행보는 다른 레거시 업체들이 시도조차 불가능한 펫 탑승 시 에어컨을 지속 유지하는 ‘도그 모드(Dog Mode)’ 같은 혁신적 기능(기존 규제에서는 냉난방 시스템의 완벽한 잉여성 부족으로 사망 사고 책임 소지 발생 우려가 있어 금기시됨)의 도입까지 가능하게 만들었다.
4. 레거시 완성차 업체의 기술적 한계 돌파 시도와 실패: 오토사(AUTOSAR)의 병목과 카리아드의 붕괴
테슬라가 소프트웨어, 하드웨어 연산 칩셋, 그리고 네트워크 아키텍처를 하나로 통합한 강력한 생태계를 바탕으로 질주하는 동안, 깊은 위기감에 휩싸인 레거시 완성차 업체들은 어떻게든 분산된 공급망을 하나로 묶어내기 위한 구명줄로 업계 표준 소프트웨어 아키텍처인 ’오토사(AUTOSAR, Automotive Open System Architecture)’에 사활을 걸었다.
4.1 클래식에서 어댑티브 오토사(Adaptive AUTOSAR)로의 진화와 성능 오버헤드
2003년 출범한 오토사 컨소시엄은 서로 다른 하드웨어와 공급업체 환경에서도 소프트웨어 코드의 재사용성을 보장하고 복잡성을 통제하기 위해 구축된 공통의 표준 언어이자 아키텍처다. 초창기에 널리 사용된 ’클래식 오토사(Classic AUTOSAR)’는 엔진 제어나 제동과 같이 마이크로초(Microsecond) 단위의 극도로 정밀하고 하드 리얼타임(Hard Real-time) 응답이 필요한 시스템에 맞춰 설계되었다. 이는 깊숙이 내장된 베어보드(Bareboard) 환경과 C 언어를 바탕으로 구축되어 ASIL-D와 같은 높은 안전성을 보장하는 데 탁월했다.
그러나 다가오는 SDV와 자율주행 시대에는 초당 기가바이트의 데이터를 쏟아내는 카메라의 시각 정보를 처리하고, 차량 외부 클라우드와의 동적인 통신을 제어하는 고성능 컴퓨팅(HPC) 능력이 필수적이었다. 제한된 메모리와 느린 CAN 통신망에 묶인 클래식 플랫폼으로는 이러한 대규모 연산 처리가 불가능했다.
이에 대응하기 위해 레거시 업계는 POSIX 표준 기반의 운영체제(Linux, QNX 등) 위에서 C++ 언어로 구동되는 보다 진일보한 미들웨어, ’어댑티브 오토사(Adaptive AUTOSAR, AP)’를 2017년 공식 도입했다. 어댑티브 오토사는 정적으로 모든 연결이 사전에 컴파일되던 과거와 달리, 이더넷 기반의 SOME/IP(Scalable service-Oriented MiddlewarE over IP) 프로토콜을 활용한다. 이를 통해 차량 내의 다양한 소프트웨어 서비스들이 런타임 중에 동적으로 서로를 찾아내고 연결되는 ‘서비스 탐색(Service Discovery)’ 기반의 아키텍처를 제공하며 유연한 무선 업데이트의 기반을 마련하고자 했다.
| 구분 | 클래식 오토사 (Classic AUTOSAR) | 어댑티브 오토사 (Adaptive AUTOSAR) |
|---|---|---|
| 적용 시스템 환경 | 깊게 내장된 소형 MCU (엔진, 제동, 에어백 등 제어) | 고성능 컴퓨팅 제어기 (HPC, ADAS, 자율주행, 인포테인먼트) |
| 기반 운영체제 (OS) | 자체 규격의 베어보드 (Bareboard) / OSEK OS | POSIX 호환 (Linux, QNX 등 범용 OS 지원) |
| 사용 프로그래밍 언어 | C 언어 중심 | C++ 언어 중심 |
| 실시간성 요구 수준 | 하드 리얼타임 (Hard Real-time, 마이크로초 단위 반응) | 소프트 리얼타임 (Soft Real-time, 대용량 데이터 처리 중시) |
| 통신 프로토콜 및 아키텍처 | CAN, LIN, FlexRay (신호 기반(Signal-based) 통신) | 차량용 이더넷, SOME/IP (이벤트 및 서비스 지향형(Service-oriented) 통신) |
| 소프트웨어 구성 방식 | 설계 시점에 정적으로 사전 결정(Static Configuration) | 실행 중 동적 서비스 탐색 및 유연한 연결(Dynamic Binding) |
[표 1: 자동차 소프트웨어 통합을 위한 오토사 플랫폼 구조 비교 ]
그러나 이론적으로는 완벽해 보였던 오토사의 가장 치명적인 약점은, 수백 개에 달하는 각기 다른 제조사의 하드웨어 장치 종속성을 끊어내기 위해 ’추상화 계층(Abstraction Layer)’을 양파 껍질처럼 겹겹이 쌓아 올린 극도로 비대하고 무거운 구조 자체에 있었다. 범용성과 표준화를 핑계로 모든 잠재적 시스템 가능성을 미들웨어 하나에 욱여넣으려다 보니 코드의 부피가 감당할 수 없이 커졌고, 이는 필연적으로 자율주행과 같이 민첩하고 폭발적인 연산이 요구되는 알고리즘을 구동할 때 심각한 데이터 지연 현상(Latency)과 막대한 연산 효율 저하(Performance Overhead)를 초래했다.
테슬라나 리비안과 같이 완전히 백지상태에서 시작한 소프트웨어 네이티브 신흥 기업들이 비대한 오토사 아키텍처를 과감히 폐기하고, 오직 자신들이 설계한 자체 칩셋 데이터 흐름과 센서 구성에만 극도로 최적화된 가볍고 날렵한 커스텀 미들웨어(Custom Stack) 스택을 사용하여 연산 효율을 한계치까지 끌어올린 것과 매우 대조적인 결과였다. 어댑티브 오토사는 다양한 공급망을 융합하는 이론적 도구로는 훌륭했으나, 그 무거운 체급으로 인해 정작 가장 고도화된 소프트웨어 구동 환경에서는 걸림돌로 전락하고 만 것이다.
4.2 폭스바겐 카리아드(Cariad)의 대붕괴와 콘웨이의 법칙(Conway’s Law)의 실현
이러한 무겁고 복잡한 오토사 기반의 거대 공급망 통합 전략이 현실 세계의 물리적 조직망과 만났을 때 얼마나 참혹하고 끔찍한 재앙을 초래할 수 있는지를 역사적으로 증명한 대표적 사례가 바로 글로벌 자동차 거인 폭스바겐(Volkswagen) 그룹의 소프트웨어 전담 자회사 ‘카리아드(Cariad)’ 사태다.
과거 폭스바겐 그룹 CEO였던 헤르베르트 디스(Herbert Diess)의 강력한 의지로 2020년 5000명 이상의 막대한 규모로 출범한 카리아드는, 폭스바겐 대중 브랜드부터 아우디, 포르쉐 등 그룹 내 산재한 모든 브랜드의 차량을 하나로 아우르는 완벽한 단일 통합 운영체제인 이른바 ’VW.OS (E3 2.0 플랫폼)’를 구축하여 유럽 최대의 소프트웨어 기업으로 군림하겠다는 장대한 비전을 세웠다.
그러나 카리아드의 참담한 붕괴는 단순한 코딩 에러나 기술적 한계에서 비롯된 것이 아니라, 수십 년간 굳어진 거대한 하드웨어 중심 조직이 보이지 않는 소프트웨어를 강제로 통합하려 할 때 발생하는 이른바 ‘사회-기술적(Sociotechnical) 붕괴’ 현상이었다. 이는 “소프트웨어 시스템의 구조는 그것을 설계하는 조직의 소통 구조를 그대로 닮는다“는 유명한 ’콘웨이의 법칙(Conway’s Law)’이 완벽하고도 비극적으로 들어맞은 전형적 사례다.
초기 카리아드 조직은 명확한 직무 기술이나 거버넌스 체계 없이 아우디, 포르쉐, 폭스바겐 각 브랜드에서 착출된 엔지니어들로 급조되었다. 카리아드 내부의 아우디 출신 엔지니어는 아우디 중심의 레거시 코드를, 포르쉐 출신은 포르쉐만의 독자적인 퍼포먼스 제어 로직을 기준 삼아 전체 시스템을 구축하려 들며 파괴적인 내부 파벌 다툼과 주도권 경쟁을 벌였다. 실질적이고 독립적인 예산 집행권조차 부여받지 못한 카리아드 경영진은 각 강력한 브랜드 본사의 눈치를 보며 정치적 입김에 휘둘릴 수밖에 없었으며, 개발자들은 코드를 짜고 혁신을 테스트하는 대신 일주일에 무려 17개가 넘는 엉성한 보고용 파워포인트 슬라이드를 생산하는 데 귀중한 시간을 허비했다.
비극의 정점은 아우디와 포르쉐의 차세대 전기차 플랫폼에 탑재될 중간 단계의 프리미엄 플랫폼인 ‘E1.2 아키텍처’ 통합 과정에서 폭발했다. 카리아드는 과거의 관성대로 무려 200여 개의 각기 다른 하청업체(Tier 1, Tier 2)들이 개별적으로 작성한 파편화된 소프트웨어 코드를 오토사 환경 위에 강제로 욱여넣어 하나로 융합하려 시도했다. 그 결과 시스템은 완전히 마비되었다. 브레이크 제어기, 전면 카메라, 측면 레이더 간의 통신이 사소한 이벤트 발생 시마다 동시다발적으로 충돌했고, 메인 컴퓨터가 지닌 막대한 연산 능력의 대부분은 각기 다른 브랜드가 요구하는 자잘한 파생 특수 요구사항을 억지로 처리하는 데 모두 낭비되어 버렸다. 한 내부 관계자는 “미래의 혁신을 구축해야 할 시간에 과거 하청업체가 남긴 레거시 시스템의 불을 끄는 데 모든 자원을 소진했다“고 회고했다.
결국 이 막장 드라마에 가까운 소프트웨어 통합의 대실패는 폭스바겐 그룹 전체의 핵심 신차 출시 타임라인을 뿌리째 뒤흔들어 놓았다. 아우디의 자율주행 플래그십 전기차로 기대를 모았던 ‘아르테미스(Artemis)’ 프로젝트는 초기 목표인 2024년 출시가 불가능해져 2027년으로 3년이나 뒤로 미루어졌고 , 포르쉐의 수익을 견인할 핵심 모델인 순수 전기 마칸(Macan EV)과 아우디 Q6 e-tron 형제 모델의 출시 역시 소프트웨어 버그를 잡지 못해 당초 2023년에서 수년 연기되는 치욕을 겪었다. 영국 럭셔리 자회사인 벤틀리(Bentley)가 호언장담했던 2030년 완전 전동화 브랜드 전환 타임라인마저 심각하게 흔들리기 시작했으며 , 그룹의 대중화를 이끌 통합 플랫폼반의 핵심 전기차 모델 ’ID.Golf’의 출시 일정은 기존 2027년에서 무려 15개월 연기된 2029년으로 완전히 밀려나 버렸다. 카리아드는 제대로 된 성과물 하나 내놓지 못한 채 2022년 한 해에만 무려 20억 달러라는 천문학적인 적자를 기록했고, 폭스바겐 경영진은 이 끔찍한 검증 지연과 재무 손실의 늪(Temporal Coupling Trap)에서 벗어날 방법을 찾지 못한 채 붕괴 직전으로 내몰렸다.
5. 2026년 주요 완성차 업체의 SDV 전략 전면 수정 및 굴욕적 생태계 종속 수용
내부 역량을 총동원하여 수천 명의 엔지니어를 직고용하고 수십억 달러의 막대한 자금을 쏟아부었음에도 불구하고 뼈아픈 참사만을 경험한 주요 글로벌 레거시 완성차 업체들은, 2026년 현재 독자적인 운영체제 플랫폼 구축이라는 환상을 깨끗이 포기했다. 이들은 과거 자동차 업계의 제왕이라는 알량한 자존심을 과감히 버리고, 외부의 혁신 기술 수혈과 거대 테크 기업의 생태계에 완벽히 종속되는 것을 전면적으로 수용하는 철저한 생존 지향적 전략으로 급선회했다.
5.1 엔비디아(NVIDIA)의 압도적 ‘Tier 0.5’ 부상과 메르세데스-벤츠의 턴키 종속 수용
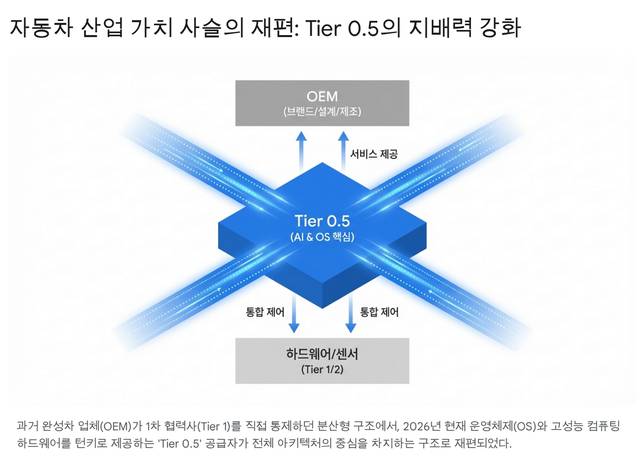
소프트웨어 역량이 부족한 제조사들의 약점을 파고들어, 전통적인 자동차 부품 공급 산업의 수직적 하청 구조(Tier 1, Tier 2)는 붕괴하고 그 자리에 ’Tier 0.5’라는 새로운 초거대 권력이 군림하기 시작했다. 과거 부품사들이 하드웨어 부품만 납품했다면, Tier 0.5 기업은 차량의 근간이 되는 전기·전자 아키텍처의 밑그림을 직접 그리고 하드웨어 연산 칩, 미들웨어, 무선 업데이트(OTA) 제어권, 외부 개발자 접근 API까지 자율주행과 시스템 통합에 필요한 모든 풀스택(Full-stack) 플랫폼을 하나의 턴키(Turn-key) 형태로 장악하여 제공한다.
이 Tier 0.5 권력의 정점에는 단연 AI 반도체 제국인 엔비디아(NVIDIA)가 자리 잡고 있다. 고급 자동차의 대명사인 메르세데스-벤츠(Mercedes-Benz)의 최신형 차량용 독자 운영체제로 불리는 ’MB.OS’의 실체는 사실상 엔비디아 생태계에 대한 철저한 종속을 상징하는 결과물에 가깝다. 벤츠는 새롭게 출시한 S-Class 및 CLA 모델 등 핵심 차량 라인업의 생살여탈권이 달린 시스템 제어와 레벨 4(Level 4) 자율주행으로의 진화를 위해, 엔비디아의 초고성능 연산 플랫폼 칩셋인 ‘DRIVE Orin’ 및 차세대 ’DRIVE Thor’를 채택했다. 더불어 하드웨어뿐만 아니라 주행 결정 소프트웨어인 ‘DRIVE AV L4’ 시스템, 그리고 클라우드 환경에서 훈련된 자율주행 AI 추론 모델인 ‘알파마요(Alpamayo)’ 알고리즘 패키지까지 엔비디아의 기술을 전면 이식받았다. 벤츠는 시스템이 고장 났을 때 다중 안전성을 보장하는 안전 가드레일 통제 기술인 ‘NVIDIA Halos’ 시스템마저 의존하며 무결성을 확보하고 있다. 나아가 차량 내부의 통제를 넘어 엔비디아의 옴니버스(Omniverse) 클라우드 시뮬레이션 환경을 활용해 공장 제조 단계부터 차량 디자인까지 전 과정을 엔비디아의 디지털 트윈 플랫폼에 결속시켰다.
이는 메르세데스-벤츠가 명품에 걸맞은 우아한 외관과 가죽 시트 등 장인정신(Craftsmanship)이 깃든 인테리어, 그리고 충돌 안전성이라는 전통적인 기계 공학적 껍데기를 제조하는 역할에 만족하고, 차량 가치의 본질적 통제권과 미래 자율주행 데이터가 창출하는 막대한 부가가치의 패권은 기꺼이 엔비디아에 귀속시키는 타협을 수용했음을 명징하게 보여준다. 젠슨 황(Jensen Huang) 엔비디아 CEO가 벤츠를 등에 업고 당당히 자율주행 비전을 선언하는 것은 더 이상 놀라운 일이 아니다. 결국 향후 발생할 자율주행 관련 구독 모델의 지속적 수익(SaaS)과 데이터 자산의 과실을 엔비디아와 강제로 배분해야만 하는 구조가 고착화되었으며, 최악의 경우 레거시 고급차 브랜드조차 거대 플랫폼 기업의 단순 하드웨어 조립 하청업체로 마진 구조가 추락할 수 있다는 구조적 위험성을 시장에 극명하게 내포하고 있다.
5.2 폭스바겐의 완전한 백기 투항과 리비안(Rivian) 합작법인(RV Tech)의 순항
가장 극적이고 상징적인 백기 투항의 주인공은 앞서 막대한 재무적 피해와 조직 붕괴를 경험한 폭스바겐 그룹이다. 자회사 카리아드의 망가진 스파게티 코드를 도저히 회생시킬 수 없다고 판단한 폭스바겐 최고경영진은, 세계 1위 자동차 제국이라는 과거의 자만심을 깨끗이 버리고 미국의 적자 투성이 전기차 스타트업인 리비안(Rivian)에 무려 총 60억 달러(초기 투자액 58억 달러에서 성과 보수로 증액)라는 천문학적 자본을 쏟아부어 양사가 절반씩 지분을 갖는 합작법인 ’RV Tech(Rivian and Volkswagen Group Technologies)’를 전격 설립하는 결단을 내렸다. 폭스바겐은 이 거액의 자금을 통해 카리아드의 헛발질로 인해 잃어버린 수년의 천금 같은 시간을 통째로 매수하고자 했으며, 리비안이 보유하고 있는 이미 양산 시장에서 철저히 검증된 혁신적이고 가벼운 구역형(Zonal) 하드웨어 아키텍처와 통합 소프트웨어 스택의 소스코드를 폭스바겐 산하의 전 브랜드 차세대 차량 전기차 플랫폼에 그대로 이식받기로 굴욕적인 계약을 맺었다.
이러한 항복 선언의 대가는 2026년에 접어들며 놀라울 정도로 신속한 가시적 성과로 나타나고 있다. 2026년 3월 말, 폭스바겐과 리비안의 합작법인 RV Tech는 미국 애리조나 피닉스의 살인적인 열사(혹서기) 환경과 스웨덴 아르예플로그의 영하를 밑도는 극한 빙설(혹한기) 환경에서 진행된 차세대 소프트웨어 정의 차량(SDV)의 시리즈 양산형 구역형 아키텍처에 대한 수개월간의 실차 검증 테스트를 매우 성공적으로 완수했다고 대내외에 공식 발표했다. 놀랍게도 폭스바겐은 기존 자사 모델인 ID.3의 길이를 축소 개조하여 테스트 노새(Mule car)로 급조한 ‘ID.EVERY1’ 프로토타입 차량을 기반으로, 아우디와 스카우트(Scout) 등 여러 브랜드의 차량에 리비안의 SDV 아키텍처를 물리적으로 이식했다. 이 프로토타입들은 수백 번의 가혹한 테스트 드라이브 동안 첨단 사륜구동(AWD) 제어, 트랙션 컨트롤 로직, 고속 무선 업데이트(OTA) 기능 등을 완벽하게 오류 없이 소화해 내며 리비안 아키텍처의 우수성을 폭스바겐 경영진 앞에 증명해 냈다.
이 핵심적인 기술적 마일스톤 달성을 조건으로, 폭스바겐은 리비안 측에 즉각 10억 달러(이 중 약 7억 5천만 달러는 순수 지분 투자액이며, 2억 5천만 달러는 테스트 프로토타입 공급 성과에 따른 추가 전환사채 성격)의 엄청난 현금 유동성을 추가로 지급하며 리비안의 숨통을 틔워주었다. 더욱 굴욕적이면서도 현실적인 대목은, 과거 독일 아우토반을 호령하던 폭스바겐 본사의 자존심 강한 핵심 소프트웨어 엔지니어 그룹이 2026년 5월부터 대거 짐을 싸서 미국 실리콘밸리에 위치한 리비안 주도의 RV Tech 팰로앨토(Palo Alto) 개발 사무소로 직접 파견되어, 스타트업 개발자들의 지도하에 새로운 소프트웨어 아키텍처 코드를 전수받고 양산 타임라인을 앞당기기 위해 합류하고 있다는 사실이다. 유럽 대륙을 제패한 세계 최대의 기계 공학 제국이, 신생 실리콘밸리 전기차 스타트업의 아키텍처 노하우를 배우기 위해 철저히 고개를 숙인 것이다.
5.3 혼다(Honda)의 절망적 기술 격차 절감과 아필라(AFEELA) 프로젝트 전면 백지화 충격
폭스바겐이 수조 원의 뭉칫돈을 싸 들고 리비안에 굴복하여 기사회생의 발판을 마련한 반면, 과거 내연기관 엔진의 대명사였던 일본의 거함 혼다(Honda)는 더욱 비참하고 극단적인 철수 결정을 내리고 말았다. 혼다는 자체적인 모빌리티 소프트웨어 개발 역량의 한계를 뼈저리게 절감하고, 이를 메우기 위해 글로벌 전자기기 및 엔터테인먼트의 거인 소니(Sony)와 손을 맞잡았다. 양사는 ’소니 혼다 모빌리티(Sony Honda Mobility, 이하 SHM)’라는 조인트 벤처를 2022년 설립하며, 고부가가치 소프트웨어와 모빌리티가 결합된 야심 찬 하이엔드 전기차 ‘아필라(AFEELA)’ 세단 및 SUV 개발 프로젝트를 대대적으로 홍보해 왔다.
그러나 2026년 3월 25일, 모빌리티 업계를 경악시킨 긴급 성명 발표와 함께 SHM은 첫 번째 양산 모델로 예정되었던 ’아필라 1(AFEELA 1)’과 두 번째 후속 SUV 모델의 개발 및 시장 출시 계획을 전면적으로 완전 중단, 즉 백지화한다고 선언했다. 회사 측이 내세운 표면적인 중단 이유는 혼다 본사가 2026년 3월 12일에 전격 단행한 ‘북미 자동차 전동화 전략의 근본적 재검토(Reassessment of automobile electrification strategy)’ 조치 때문이었다.
하지만 이 충격적인 프로젝트 포기의 실질적이고 깊은 원인은, 이종 산업 간의 SDV 플랫폼 아키텍처 통합이 지닌 끔찍한 기술적 난관과 막대하게 누적되는 자본의 재무적 압박을 두 회사가 도저히 감당할 수 없었음에 기인한다. 당초 아필라의 뼈대가 될 예정이었던 기반은 혼다가 미국 오하이오 공장에서 양산하려던 자사의 차세대 전기차 플랫폼 ‘0 시리즈(0 Series)’ 하드웨어 아키텍처(e:Architecture)였다. 그러나 혼다 본사가 수익성 악화와 소프트웨어 역량 한계를 이유로 미국 시장을 타깃으로 한 아큐라 RSX(Acura RSX) 및 0 시리즈 기반 세단, SUV 등 3개 주력 신차 모델의 개발 및 생산 계획 자체를 도중에 완전히 엎어버렸다. 이로 인해 SHM은 아필라 프로젝트에 필수적으로 이식받아야 할 핵심 하드웨어 기반 플랫폼과 주요 에셋(Technologies and Assets)을 일순간에 상실하게 되었다. 기반 섀시와 전기차 플랫폼이 허공으로 날아가 버린 SHM은 이 껍데기뿐인 벤처를 살려 독자적인 전기차 모델을 시장에 진입시킬 ’실현 가능한 경로(Viable path forward)’가 완전히 붕괴되었다고 최종 판단한 것이다.
결국 SHM은 미국 캘리포니아주에서 높은 기대감을 안고 차량을 사전 예약했던 초기 예비 고객들의 예약금 전액을 100% 환불 처리하는 치욕스러운 조치에 착수하며 사실상 양산차 시장에서 도망치듯 철수했다. 미베 토시히로 혼다 사장의 이러한 급작스러운 전동화 포기 전략은 투자자들에게 엄청난 충격을 주었으며, 소니 내부에서도 SHM을 이끌던 핵심 인사인 카와니시 이즈미 최고운영책임자(COO) 등 소니 수뇌부의 향후 경력과 리더십에 심각한 타격을 입힐 것으로 예측된다. 혼다의 아필라 프로젝트 참사는, 아무리 소니와 같은 세계 최고의 전자기기 및 인포테인먼트 소프트웨어 기술을 외부에서 가져와 덮어씌운다 할지라도, 그 기저를 이루는 핵심 차량 통합 토폴로지와 하드웨어 E/E 플랫폼을 제조사 스스로 장악하고 안정화시키지 못한다면 테슬라나 중국 신흥 강자들이 장악한 잔혹한 전기차 시장에서 결코 살아남을 수 없다는 비정한 자동차 산업의 진리를 또 한 번 입증한 비극적 사례로 남게 되었다.
5.4 현대자동차그룹의 파격적 거버넌스 재편: 이상보다 현실적 ’안정성’과 ‘One Team’ 통합
폭스바겐이 천문학적인 자금을 들여 미국 스타트업에 종속되는 굴욕을 감수하고, 혼다가 전기차 프로젝트 자체를 포기하는 극단적 양상을 보이는 동안, 대한민국의 글로벌 거대 제조사인 현대자동차그룹은 외부 수혈보다는 내부 개발 조직의 거버넌스를 지극히 현실적이고 강력하게 재편하는 ‘내부 결속과 통제권 강화’ 전략을 승부수로 띄웠다.
초기 현대차그룹의 SDV 진입 전략은 네이버 출신 송창현 전 사장이 이끄는 자율주행 소프트웨어 전문 스타트업 ’포티투닷(42dot)’을 전초기지로 삼아, 하드웨어 중심의 무겁고 느린 기존 남양연구소 R&D 조직을 우회하여 별동대 형식으로 소프트웨어 혁신을 달성하려는 이원화된 투 트랙(Two-track) 접근법이었다. 그러나 실제 차량을 개발하는 과정에서 하드웨어를 통제하는 전통 엔지니어링 그룹과 순수 소프트웨어 논리를 우선시하는 외부 영입 개발자 그룹 간에 지속적인 문화적 마찰과 차량 제어 시스템 통합 과정의 충돌 등 여러 가지 치명적인 부작용이 노출되었다.
이에 2026년에 이르러 현대차그룹 최고 경영진은 과감하고 전격적인 리더십 교체와 조직의 화학적 통폐합을 결정했다. 먼저, 엔비디아(NVIDIA) 자율주행 소프트웨어 부문 부사장과 테슬라에서 핵심 자율주행 시스템 개발을 주도했던 검증된 실리콘밸리 엔지니어 출신인 박민우 박사(1977년생)를 사장급인 신임 AVP(Advanced Vehicle Platform, 미래차플랫폼) 본부장 겸 42dot의 새로운 대표이사 최고경영자(CEO)로 전격 영입하여 통합 사령탑 자리에 앉혔다. 현대차그룹은 기존에 산재해 있던 CTO 직속 산하 조직들과 과거의 SDV 본부, 모빌리티 기술 가속 조직(META Tech Unit), 그리고 차량 소프트웨어 부문(Vehicle SW Tech Unit)을 모조리 하나로 긁어모아 강력한 단일 통제 부서인 ‘AVP 본부’ 아래 통폐합시키는 대대적인 조직 개편을 완료했다. 한편, 철저한 기계적 차량 개발 역량을 책임지는 핵심 부서인 TVD(Total Vehicle Development) 본부장 출신의 양희원 부사장을 사장으로 승진시켜 전통 R&D 본부장 자리에 앉힘으로써, 양희원 사장의 거대 하드웨어 설계 조직과 박민우 사장의 소프트웨어 통합 조직(AVP)이 동등한 위치에서 서로를 긴밀히 상호 견제 및 협력하는 강력한 기둥 역할을 하도록 구조를 재정비했다.
박민우 신임 사장은 취임 직후 42dot과 AVP 본부 직원들을 향한 강력한 첫 메시지를 통해, 과거 전임자 시절 기술 지상주의에 매몰되어 외부 경쟁사보다 뒤처지고 있다는 비판에 직면했던 부서 내 팽배한 불안감을 잠재웠다. 그는 “향후 SDV 경쟁의 진정한 승패와 리더십은 ’누가 세상에 없는 신기술을 하루라도 먼저 개발했느냐’의 단순한 속도전에 있는 것이 아니라, 시장에 출시된 제품이 ’얼마나 빠르고, 압도적으로 안정적이며, 고객이 시장에서 안심하고 사용할 수 있는 스케일업(Scale-up) 시스템 안전성’을 갖추었느냐에 달려 있다“고 일갈하며 , 테슬라의 FSD 성능인 자율주행 레벨 2++ 이상 및 레벨 3 기술의 상용화 달성을 정조준했다. 더불어 과거의 분열을 끊어내고 42dot과 현대차 내부 인력 간의 화학적 융합을 통한 진정한 ‘원팀(One Team)’ 통합 구축을 조직의 최우선 가치로 내세웠다.
더 나아가 경영권 측면에서 현대차그룹은 2026년 2월 23일, 자회사 42dot의 임시 주주총회를 통해 초기 외부 벤처 투자자들이 쥐고 있던 보통주 및 우선주 50만 6,607주를 주당 12만 9,000원의 고정 가격으로 전량 매입하여 강제로 소각하는 무려 653억 원 규모의 대대적인 자본 구조 축소(Capital Reduction) 조치를 무력으로 단행했다. 언뜻 보면 단순한 벤처 자본 재조정처럼 보이지만, 현대차가 2022년 42dot을 처음 인수할 당시 높게 쳐주었던 가치를 그대로 유지해 줌으로써 초기 투자자들에게 손실(Down Round) 없는 명예로운 엑시트(Exit) 출구를 마련해 주는 동시에, 외부 간섭의 여지를 영구히 차단한 극히 이례적이고 전략적인 재무 기동이었다.
이러한 지분 매입 소각 조치가 완료됨에 따라 롯데렌탈 등 외부 소액 주주의 지분은 2% 남짓으로 쪼그라들었으며, 현대자동차(약 59%)와 기아(약 39%) 양사가 합쳐 무려 98%에 달하는 압도적인 초거대 지분을 확보하게 되었다. 완전히 단순화된 지배구조는 폭스바겐 카리아드의 사례처럼 사공이 많아 배가 산으로 가는 끔찍한 의사결정의 지연을 미연에 방지하고, 자율주행과 차량 소프트웨어라는 초단기 개발 사이클을 요하는 전장 환경에서 현대차·기아 최고위층의 의사결정이 AVP 본부와 42dot 개발팀의 말단까지 직통으로 꽂히는 무결점의 신속한 기동력을 부여하게 된다. 이는 상용화의 무리한 속도전에 목숨을 걸기보다는 아키텍처 통합의 안정적 거버넌스를 다지는 전략이 궁극적인 SDV 전쟁에서 살아남는 길이라는 현대차그룹의 냉철한 현실 인식을 시사한다.
6. 결론: 기계 공학 시대의 종말과 소프트웨어 제국주의의 도래
자동차 산업이 직면한 SDV 패러다임으로의 강제적 전환은 단순히 기계 덩어리에 IT 모니터와 칩셋을 몇 개 끼워 넣는 수준의 가벼운 접목이 결코 아니다. 이는 지난 100여 년간 인류가 신봉해 온 자동차라는 하드웨어의 기계적 설계 철학과 물리적 한계점(E/E 아키텍처), 그리고 수천 개의 부품사들이 거미줄처럼 엮여 있던 전통적인 수직적 하청 공급망 생태계의 질서를 근본적으로 모조리 파괴하고 백지상태에서 완전히 새롭게 재창조해야만 하는 지독하게 가혹한 멸망과 탄생의 진통 과정이다.
레거시 완성차 업체들이 과거의 찬란했던 기계적 유산에 집착한 나머지, 수백 개의 낡은 분산형 ECU와 무거운 물리적 스파게티 배선을 그대로 껴안은 채 가장 무겁고 관료적인 오토사(AUTOSAR) 기반의 추상화 계층으로 수백 개의 협력사 코드를 억지로 융합하려 했던 시도, 즉 폭스바겐 카리아드가 E1.2 플랫폼에서 저질렀던 끔찍한 통합 실패의 참사는 이미 예견된 구조적 필연이었다. 치명적인 기능 안전 규제(ISO 26262)를 대하는 안일한 태도에서도 레거시 업체들은 기존 부품 단위의 V-모델 무결성 입증이라는 낡은 덫에 갇혀, 정작 찰나의 순간에 버그를 수정하고 차량의 가치를 극대화해야 할 애자일(Agile)한 소프트웨어 배포(CI/CD)의 혁신 능력을 스스로 억압하고 말았다.
반면, 이러한 구시대의 족쇄에서 완전히 자유로웠던 테슬라는 극단적으로 얇고 가벼운 커스텀 운영체제(Linux)와 144 TOPS의 괴력을 뿜어내는 자체 설계 괴물 칩셋(FSD Chip)을 결합시켰다. 이들은 개별 칩셋의 완벽함을 증명하는 지루한 문서 작업 대신, 독립된 두 개(혹은 3개)의 칩이 무자비하게 상호 교차 검증을 벌이는 이중화(Redundancy) 및 삼중화 설계로 규제의 두터운 벽을 영리하게 시스템적으로 우회 돌파했다. 나아가 전 세계 도로를 달리는 수백만 대의 개인 차량을 섀도 모드(Shadow Mode)의 실험실로 삼아 AI 알고리즘을 무한대로 폭발시키며 차세대 SDV 아키텍처의 절대적인 사실상(De facto) 표준을 선점해 버렸다.
그리고 마침내 도달한 2026년의 자동차 생태계는, ’과연 스스로 소프트웨어 아키텍처를 온전히 뜯어고치고 통제할 수 있는가?’라는 단 하나의 질문에 대한 가장 잔인하고도 투명한 생존 채점표가 백일하에 공개된 시점이다. 과거의 영광과 자존심을 처절하게 내던진 채 미국의 적자 전기차 스타트업 리비안(Rivian)의 팰로앨토 문을 두드려 60억 달러라는 거액을 쥐여주고 굴욕적인 기술 전수를 구걸하여 극적으로 기사회생의 불씨를 살려낸 폭스바겐, 엔비디아(NVIDIA)라는 새로운 ‘Tier 0.5’ 플랫폼 권력 앞에 사실상 핵심 두뇌의 통제권과 미래 자율주행의 이윤을 통째로 헌납하며 고개를 숙인 메르세데스-벤츠, 기술의 거대한 벽을 넘지 못하고 야심 찼던 아필라(AFEELA) 프로젝트를 단숨에 휴지통에 처박으며 도망친 혼다, 그리고 포티투닷 초기 투자자들의 지분을 싹쓸이하여 거버넌스의 분열을 강제로 봉합하고 ’안정성 최우선’의 현실주의 노선으로 회항한 현대자동차그룹의 처절한 투쟁 사례는, 앞으로 펼쳐질 모빌리티 생존 전쟁의 극단적이고도 끔찍한 양극화를 소름 끼치도록 선명하게 보여준다.
결론적으로, 향후 10년의 자동차 산업 전장에서 전통적 완성차 업체의 무기였던 ’단차 없는 기계적 조립 역량’이나 ’승차감 튜닝 기술’은 누구라도 돈만 주면 위탁 생산할 수 있는 철저한 범용화(Commoditization)의 나락으로 떨어질 위험에 직면해 있다. 진보된 구역형(Zonal/Central) 고성능 컴퓨팅 하드웨어 토폴로지를 자체적으로 구축하고 가벼운 운영체제 스택을 온전히 내부의 의지대로 통제하지 못하는 껍데기 제조사는, 결국 엔비디아와 같은 거대 실리콘밸리 테크 기업이나 리비안, 테슬라와 같은 선도적 전기차 괴물 군단에 샷시(Chassis)와 철판 껍데기만을 납품하며 연명하는 초라한 2차 하청업체로 전락하는 비참한 최후를 맞이하게 될 것이다. 2026년은 기계 공학의 오만함이 지배하던 하드웨어 종속 시대가 완전히 무덤으로 들어가고, 소프트웨어 제국주의가 모빌리티 산업을 완벽하게 식민 지배하기 시작하는 돌아올 수 없는 가장 결정적인 변곡점의 해로 역사에 기록될 것이다.
7. 참고 자료
- Getting ready for next-generation E/E architecture with zonal compute - McKinsey, https://www.mckinsey.com/industries/semiconductors/our-insights/getting-ready-for-next-generation-ee-architecture-with-zonal-compute
- Beyond the Screen: 6 ways software transforms how the car moves - CARIAD, https://cariad.technology/de/en/news/stories/beyond-the-screen-software-in-motion.html
- The Software-Defined Vehicle: A Structural Industry Reset - Seraph, https://seraph.com/articles/software-defined-vehicle-a-structural-reset/
- How a Zone Architecture Paves the Way to a Fully Software-Defined Vehicle - Texas Instruments, https://www.ti.com/lit/spry345
- As Auto Software Revs Up, Suppliers Need to Switch Gears, https://www.bcg.com/publications/2024/auto-software-revs-up-suppliers-switch-gears
- Zonal Architecture 101: Reducing Vehicle System Development Complexity | onsemi, https://www.onsemi.com/company/news-media/blog/automotive/en-us/zonal-architecture-101-reducing-vehicle-system-development-complexity
- SDV Series Episode 2: From Domains to Zones | Keysight Blogs, https://www.keysight.com/blogs/en/inds/auto/2025/09/levels-of-sdvs
- Meeting ASIL D & ISO 26262 Requirements with Automation | Synopsys Blog, https://www.synopsys.com/blogs/chip-design/asil-d-certification-automation.html
- Why VW Fails with Cariad: Analysis and Learnings - Automotive Digital Transformation, https://www.adt.media/software-defined-vehicles/why-vw-fails-with-cariad-analysis-and-learnings/644658
- News - March 25, 2026 Discontinuation of Development and Launch …, https://www.shm-afeela.com/en/news/2026-03-25/
- The Company That Watched Its Competitor Fail—And Did Worse - TechConstant, https://www.techconstant.com/the-company-that-watched-its-competitor-fail-and-did-worse/
- Rivian Unlocks $1 Billion from Volkswagen After Joint Venture Hits Major Milestone, https://riviantrackr.com/news/rivian-unlocks-1-billion-from-volkswagen-after-joint-venture-hits-major-milestone/
- How China Turned Tier 0.5 Into Power—and What LG and Bosch Are Betting Instead, https://automobility.io/2026/02/how-china-turned-tier-0-5-into-power-and-what-lg-and-bosch-are-betting-instead/
- Classic AUTOSAR vs Adaptive AUTOSAR in Automotive Difference - SRM Technologies, https://www.srmtech.com/knowledge-base/blogs/classic-autosar-vs-adaptive-autosar/
- automotive-sdv-solution-brief.pdf - Intel, https://www.intel.com/content/dam/www/central-libraries/us/en/documents/2024-04/automotive-sdv-solution-brief.pdf
- Automotive Zonal Architecture & Domain Controller Market, 2035 - Global Market Insights, https://www.gminsights.com/industry-analysis/automotive-zonal-architecture-domain-controller-market
- Navigating the Software-Defined Frontier: The Rise of Zonal E/E Architecture, https://www.einpresswire.com/article/901258445/navigating-the-software-defined-frontier-the-rise-of-zonal-e-e-architecture
- AUTOSAR Adaptive vs Classic — What’s Different and How They Coexist, https://autosar.io/en/insights/autosar-adaptive-vs-classic
- Autonomous Vehicle AI Infrastructure: Edge-to-Cloud GPU Requirements - Introl, https://introl.com/blog/autonomous-vehicle-ai-infrastructure-edge-cloud
- Centralized or Zonal? ECU Architecture Strategies for Software-Defined Vehicles in 2026, https://promwad.com/news/centralized-vs-zonal-ecu-architecture-software-defined-vehicles-2026
- Talking SDVs and zonal architecture with TE Connectivity - SAE International, https://www.sae.org/articles/2025/11/talking-sdvs-zonal-architecture-te-connectivity
- Zonal Wiring Architecture Will Make EVs Easier to Assemble, https://www.assemblymag.com/articles/99859-zonal-wiring-architecture-will-make-evs-easier-to-assemble
- Zonal Architecture vs. Domain Architecture: Modular Automotive Infrastructure Face Off, https://www.molex.com/en-us/blog/zonal-architecture-vs-domain-architecture-modular-automotive-infrastructure-face-off
- Addressing zonal architecture challenges in the automotive industry - EE World Online, https://www.eeworldonline.com/addressing-zonal-architecture-challenges-in-the-automotive-industry/
- Mastering AUTOSAR: Architecture, Adoption, and Strategic Execution - VTI, https://vti.com.vn/mastering-autosar-architecture-adoption-and-strategic-execution
- Safety Integrated Hardware Solutions to support ASIL D Applications - White Paper - NXP Semiconductors, https://www.nxp.com/docs/en/white-paper/FUNCSAFTASILDWP.pdf
- Addendum to Tesla NACS: Examples Where the Best Technology …, https://thelastdriverlicenseholder.com/2024/07/01/addendum-to-tesla-nacs-examples-where-the-best-technology-did-not-become-the-standard/
- Safe Automated Driving: Requirements and Architectures - The Autonomous, https://www.the-autonomous.com/wp-content/uploads/2023/12/wg-safetyarchitecture-full-report-a4.pdf
- Review and Prospect of Integration Compatibility in Digital Vehicles: Multi-Dimensional Challenges and Industry Practice - MDPI, https://www.mdpi.com/2075-1702/13/9/786
- Can someone explain why Tesla doesn’t follow the same regulations? - Reddit, https://www.reddit.com/r/electricvehicles/comments/1edlwt8/can_someone_explain_why_tesla_doesnt_follow_the/
- AUTOMOTIVE SOLUTIONS - Wind River, https://www.windriver.com/themes/Windriver/pdf/Wind_River_Automotive_Solutions_Brochure_and_Overview.pdf
- Tesla Autopilot hardware - Wikipedia, https://en.wikipedia.org/wiki/Tesla_Autopilot_hardware
- Tesla’s Hardware Evolution: HW4.5 Sighting and the Path to AI5 - Tparts, https://www.tparts.com/blogs/tesla-knowledge-blogs/tesla-s-hardware-evolution-hw4-5-sighting-and-the-path-to-ai5
- Tesla Full Self Driving ASIC – Perspectives - James Hamilton’s Blog, https://perspectives.mvdirona.com/2019/04/tesla-full-self-driving-asic/
- Beyond the Criticism: The Real Value of Adaptive AUTOSAR in Automotive Software, https://medium.com/@basha.moustafa/beyond-the-criticism-the-real-value-of-adaptive-autosar-in-automotive-software-8d6702c2ddf6
- Comparison of AUTOSAR Classic and Adaptive Platforms - MATLAB & Simulink, https://www.mathworks.com/help/autosar/ug/autosar-platform-comparison.html
- Automotive middleware: AUTOSAR Adaptive vs custom stacks - Promwad, https://promwad.com/news/automotive-middleware-autosar-adaptive-vs-custom-stacks
- The CARIAD Insider Report (and What We Can Learn from It) - The German Autopreneur, https://germanautopreneur.com/p/cariad-volkswagen-software-failure-lessons
- EV Software Challenges: Lessons from Volvo and Volkswagen - S&P Global, https://www.spglobal.com/automotive-insights/en/blogs/2024/8/briefcase-ev-software-challenges-lessons-from-volvo-and-volksw
- Software problems at Cariad delay Volkswagen’s model planning - electrive.com, https://www.electrive.com/2022/07/14/software-problems-at-cariad-delay-volkswagens-model-planning/
- Volkswagen’s Most Important Model Facing Huge Delays - CarBuzz, https://carbuzz.com/volkswagen-id-golf-delayed-2029-software-delays/
- Volkswagen’s Woes Remind Us That Combining Hardware With Software Is Hard - Forrester, https://www.forrester.com/blogs/volkswagens-woes-remind-us-that-combining-hardware-with-software-is-hard/
- Automotive Tier 0.5 Suppliers Market Outlook 2024-2030 - Frost & Sullivan, https://store.frost.com/tier-0-5-suppliers-in-the-automotive-value-chain-global-2024-2030.html
- Mercedes-Benz Unveils New S-Class Built on NVIDIA DRIVE AV …, https://blogs.nvidia.com/blog/mercedes-benz-l4-s-class-drive-av-platform/
- Mercedes Benz Automotive Partner - NVIDIA, https://www.nvidia.com/en-us/solutions/autonomous-vehicles/partners/mercedes/
- Mercedes-Benz x NVIDIA | Autonomous Driving Demonstration | Level 2++ - YouTube, https://www.youtube.com/watch?v=WHOusSrKt6k
- NVIDIA DRIVE Hyperion Platform Achieves Critical Automotive Safety and Cybersecurity Milestones for AV Development, https://investor.nvidia.com/news/press-release-details/2025/NVIDIA-DRIVE-Hyperion-Platform-Achieves-Critical-Automotive-Safety-and-Cybersecurity-Milestones-for-AV-Development/default.aspx
- The AI Economy Is Here: NVIDIA Powers Mercedes-Benz, Google Buys Energy Firm, https://cloudwars.com/ai/the-ai-economy-is-here-nvidia-powers-mercedes-benz-google-buys-energy-firm/
- Nvidia partners with Mercedes to pursue self-driving cars - YouTube, https://www.youtube.com/watch?v=tW3z073DA50
- Volkswagen Group’s joint venture with Rivian hits latest milestone, unlocking another $1B for the EV automaker, https://electrek.co/2026/03/27/volkswagen-groups-joint-venture-with-rivian-hits-latest-milestone-unlocking-another-1b-for-the-ev-automaker/
- VW and Rivian conclude winter testing programme, https://www.electrive.com/2026/03/27/vw-and-rivian-conclude-winter-testing-programme/
- Software-Defined Vehicles: Joint Venture RV Tech Successfully …, https://www.volkswagen-group.com/en/press-releases/software-defined-vehicles-joint-venture-rv-tech-successfully-completes-winter-testing-20235
- Rivian-VW JV RV Tech completes winter testing of first generation SDV architecture, https://www.marklines.com/en/news/342359
- Sony Honda Mobility pauses Afeela project after Honda decision, https://www.electrive.com/2026/03/26/sony-honda-mobility-pauses-afeela-project-after-honda-decision/
- Sony and Honda Cancel Development of the Afeela 1 Electric Sedan - Car and Driver, https://www.caranddriver.com/news/a70844284/sony-honda-afeela-1-canceled/
- Sony Honda Mobility Cancels Car Plans, https://www.kbb.com/car-news/sony-honda-mobility-cancels-car-plans/
- Sony’s Electric Car Project Is Dead, https://www.autoblog.com/news/sonys-electric-car-project-is-dead
- Honda and Sony drop joint EV development project, https://www.japantimes.co.jp/business/2026/03/26/companies/sony-honda-ev-end/
- Hyundai Motor Group Appoints Dr. Minwoo Park as Head of …, https://www.hyundainews.com/releases/4672
- Hyundai Motor and Kia Establish R&D Structure to Enhance Future Mobility Capabilities, https://www.hyundai.com/worldwide/en/newsroom/detail/hyundai-motor-and-kia-establish-r%2526d-structure-to-enhance-future-mobility-capabilities-0000000402
- Hyundai President Park Stresses Scalable Autonomous Driving, Safety, ‘One Team’, https://www.chosun.com/english/industry-en/2026/01/21/X464GKAFCBGRXHHQE5HN5JF27Y/
- Hyundai Motor President Vows to Unify AVP and 42dot for Faster Autonomous Driving Commercialization - Seoul Economic Daily, https://en.sedaily.com/finance/2026/01/21/hyundai-motor-president-vows-to-unify-avp-and-42dot-for
- Hyundai Motor Tightens Control Over 42dot With $50M Capital Reduction, Strengthening Autonomous Driving Strategy - KMJ, https://www.kmjournal.net/news/articleView.html?idxno=9174